博文
- 读书笔记——基于效用引导的位姿空间采样方法
- 本文作为论文Toward Optimal Configuration Space Sampling的阅读笔记。 这篇文章最大的看点在于把经济学中的“效用(utility)”概念引入运动规划,通过不断选取效用最高的采样点加入roadmap,使得roadmap能够较好地捕获自由空间的连通性,同时保持较小的规模。说白了,引入“效用”概念还 ...
- 读书笔记——基于预测模型的运动规划
- 热度 1
- 本文作为论文Sampling-Based Motion Planning Using Predictive Models的阅读笔记。 个人感觉,将机器学习应用到运动规划是个大趋势,可是,这方面的论文数量却是少之又少,实在令人费解。偶然间读到了University of Massachusetts-Amherst的两个牛人Brendan Burns和Oliver Brock写的论文, ...
- 读书笔记——RESAMPL,一种区域敏感的自适应规划方法
- 热度 1
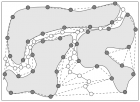
- 本文作为论文RESAMPL: A Region-Sensitive Adaptive Motion Planner的阅读笔记。 这篇论文发表在08年的Algorithm Foundation of Robotics VII上,可见此论文含金量较足。和高斯采样、桥测试一样,它要解决的是位姿空间中存在窄道等困难区域时的路径规划问题。方法的新颖之处如同题目中提到的 ...
- 读书笔记——OBPRM,一种基于障碍物的PRM
-
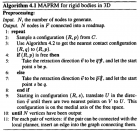
本文作为论文OBPRM:An Obstacle-Based PRM for 3D Workspaces的阅读笔记。 其实,提出OBPRM的这篇论文算是我在运动规划这个方向上较早地读过的一篇文章,但是,由于自己对PRM的理解不够透彻,OBPRM到底是什么,我一直没有搞清楚。TAMU的Nancy M. Amato教授 ...
- 读书笔记——MLDP,在PRM中解决窄道采样问题
-
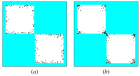
本文作为论文Multi-Level Free-Space Dilation for Sampling Narrow Passages in PRM Planning的阅读笔记。 与SSRP类似,这篇文章提出的方法也属于收回策略,即通过收缩障碍物和机器人的几何模型来实现窄道增宽,在得到的膨胀自由空间$F^{'}$ 中规划出一条 ...

- 读书笔记——SSRP,一种解决PRM中窄道问题的方法
-
本文作为论文Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method的阅读笔记。 我从这篇文章中得到的第一个有趣信息是关于解决窄道问题方法的分类。作者把这些方法分成两大类:过滤(filtering)和收回(retraction) ...

- 读书笔记——MAPRM,在自由空间的中轴上采样
-
本文作为论文MAPRM: A Probabilistic Roadmap Planner with Sampling on the Medial Axis of the Free Space的阅读笔记。 首先,做好思想准备:这是一篇需要一点拓扑学知识的文章。如果你对拓扑学有较多的了解,那么这篇文章根本没难度;否则,请先跟随我 ...
- 读书笔记——桥测试,一种解决PRM中窄道问题的好方法
-
本文作为论文The Bridge Test for Sampling Narrow Passages with Probabilistic Roadmap Planners的阅读笔记。 窄道(narrow passage)问题在运动规划领域算是臭名昭著了。由于窄道的体积(volume)总是很小,导致一些基于体积的 ...