博文
基于数据驱动的冗余机器人末端执行器位姿控制方案
|
引用本文
金龙, 张凡, 刘佰阳, 郑宇. 基于数据驱动的冗余机器人末端执行器位姿控制方案. 自动化学报, 2024, 50(3): 518−526 doi: 10.16383/j.aas.c230273
Jin Long, Zhang Fan, Liu Bai-Yang, Zheng Yu. Position and orientation control scheme for end-effector of redundant manipulators based on data-driven technology. Acta Automatica Sinica, 2024, 50(3): 518−526 doi: 10.16383/j.aas.c230273
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c230273
关键词
冗余机器人,数据驱动,位姿控制,轨迹跟踪
摘要
模型未知的冗余机器人执行任务的过程中会产生较大的控制误差, 其末端执行器的位置与姿态也需要针对不同任务进行修正. 为解决该问题, 提出一种基于数据驱动的冗余机器人末端执行器位置与姿态控制方案. 该方案使用在线学习技术, 能够应用于模型未知的冗余机器人控制. 同时引入四元数表示法将控制机器人末端执行器姿态问题转化为基于四元数表示的控制方法. 随后, 设计一种神经动力学求解器对所提方案进行求解. 相关的理论分析、仿真及对比体现了所提方案的可行性、有效性与新颖性.
文章导读
机器人从自由度上可分为非冗余机器人和冗余机器人[1]. 非冗余机器人是指关节自由度小于或等于任务空间维度的机器人. 不同于非冗余机器人, 冗余机器人的关节自由度大于任务空间维度, 其额外的关节自由度提升了控制过程中的灵活性, 使机器人能够实现障碍物躲避等其他附加任务的能力[2-4]. 现存的大多数冗余机器人控制方案都需要准确的机器人模型信息, 如机器人出厂标定的DH (Denavit-Hartenberg)参数[5]. 它通过4个参数确定关节与连杆间的转化关系, 辅助科研人员实现机器人的精确建模. 文献[6]提出一种复杂工作空间下的机器人实时规划方法, 使机器人在跟踪目标运动的同时, 实现了躲避障碍物的功能. 为提高移动机器人搬运物品的效率, 文献[7]提出一种基于双向采样的方案, 用于为给定的移动机器人移动拾取和运输线路生成期望轨迹. 实验表明该方案能够降低35%的移动时间并提升16倍的计算速度. 一种正交投影机器人重复运动方案在文献[8]中提出, 解决了现有的重复运动方案存在的因关节角度误差而导致的位置误差问题. 上述冗余机器人的控制方案都是在假定机器人模型已知的情况下, 设计并构建控制方案驱动机器人完成目标任务. 然而, 机器人的模型信息通常会因实际使用过程中配备不同类型的末端执行器而发生改变. 这会导致此类方案控制精度降低, 甚至导致任务的失败.
数据驱动技术自提出以来就受到了国内外的高度重视[9-10]. 其主要思想是通过收集并利用系统运行过程中大量的在线、离线数据, 实现对系统有效、鲁棒、稳定的建模与控制[11-12]. 数据驱动技术的提出有效地解决了模型不确定或者模型发生改变时的系统控制问题. 已有学者将数据驱动的思想应用于机器人控制领域, 并取得了卓越的成果. 针对机器人在实际使用过程中出现的模型不确定问题, 文献[13]提出一种基于数据驱动的位置/力控制方案, 从运动学的角度解决了模型未知的机器人位置/力控制问题. 文献[14]提出一种加速度层数据驱动的重复运动规划方案, 并构造了相应的递归神经网络, 对模型未知的冗余机器人提供了一种新的加速度层解决方案. 大量研究表明数据驱动技术能够对模型未知的机器人进行有效控制, 具有较强的应用价值.
冗余机器人的轨迹跟踪控制同样是一个重要的研究方向. 机器人面临的大多数任务需要控制机器人的末端执行器沿预定的轨迹运动. 基于速度层、加速度层的算法被提出用于求解冗余机器人的最优解. 值得指出的是, 目前大多数从运动学和优化角度建模的方法存在两方面的不足[15-17]. 一方面, 这些方法基于机器人结构信息已知的情况实现对机器人的控制. 例如, 文献[18]基于冗余机器人的模型构建了一个动态神经网络方法, 实现了良好的控制性能. 然而, 结构信息不准确或未知的机器人是可能存在的. 例如, 物流机器人可能会受到货物形状、重量等因素的影响, 导致其结构信息不准确. 同样地, 自研机器人的设计和制造过程中也可能因人为疏忽或技术限制等原因导致其结构信息错误. 因此, 面向结构信息不准确或未知的机器人, 上述基于准确结构信息的方法将无法被应用. 另一方面, 这些方法仅考虑机器人末端执行器的位置跟踪, 忽略了其姿态控制的重要性. 例如, 文献[14]构建了一个可应用于结构信息未知机器人的重复运动控制方案, 但其仅考虑了末端执行器的位置跟踪, 在一定程度上限制了其应用场景. 事实上, 机器人末端执行器的姿态控制在大多数应用场景下都是不可或缺的, 在机器人执行任务的同时, 还需对其末端执行器姿态加以控制. 例如医疗手术、工业制造等领域[19-20]. 为弥补现有方法以上两方面的不足, 本文构建了基于数据驱动的冗余机器人末端执行器位姿控制方案. 该方案从机器人的运动学出发, 用四元数表示了末端执行器的姿态, 实现了对末端执行器位姿的控制. 此外, 一种神经动力学求解器被设计用于方案求解. 相关的理论分析与仿真实验均验证了方案的有效性与可行性, 与现有冗余机器人位姿控制方案的比较结果体现了所提方案的新颖性.
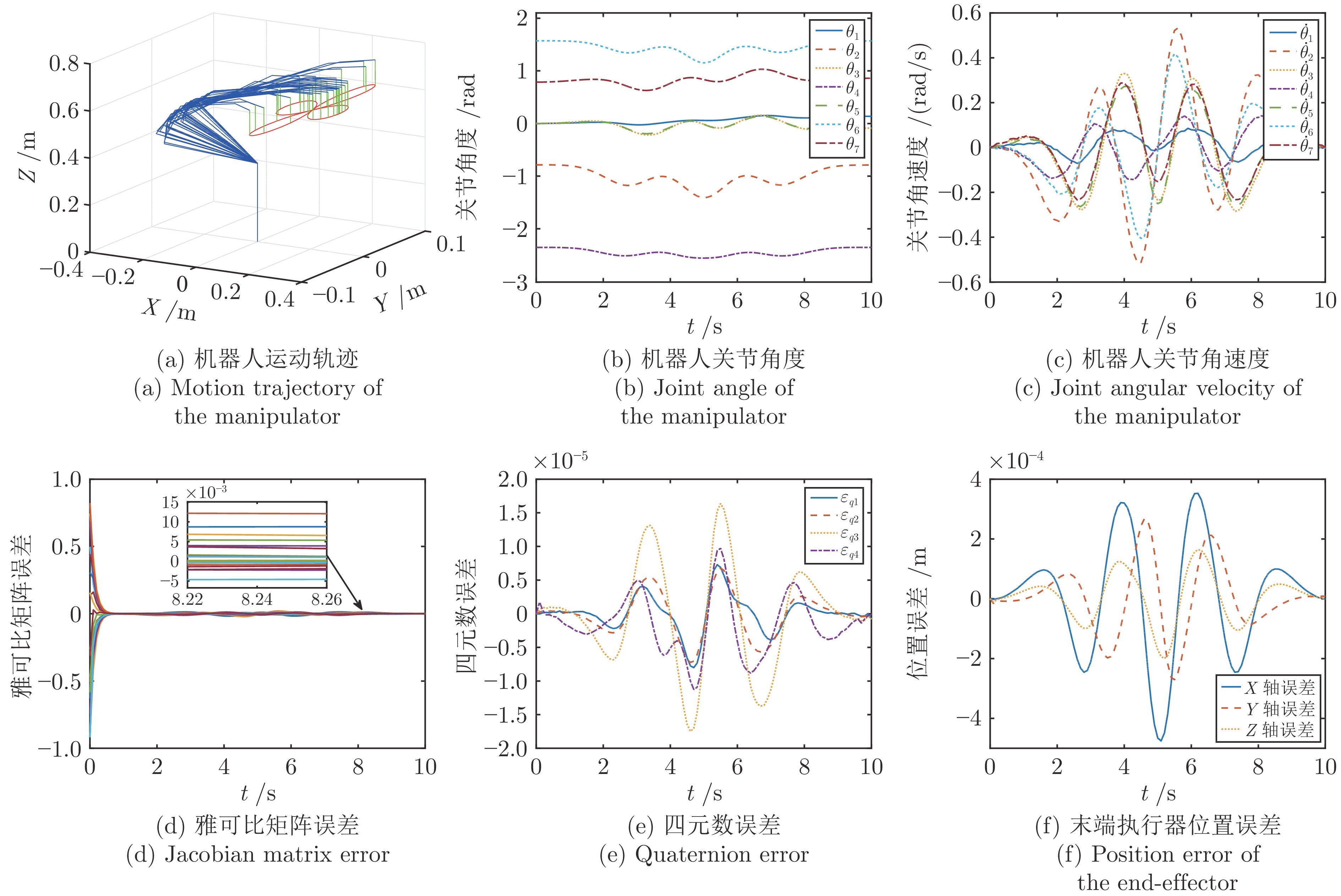
图 1 采用所提方案(14)实现冗余机器人末端执行器位置跟踪与姿态保持的仿真结果
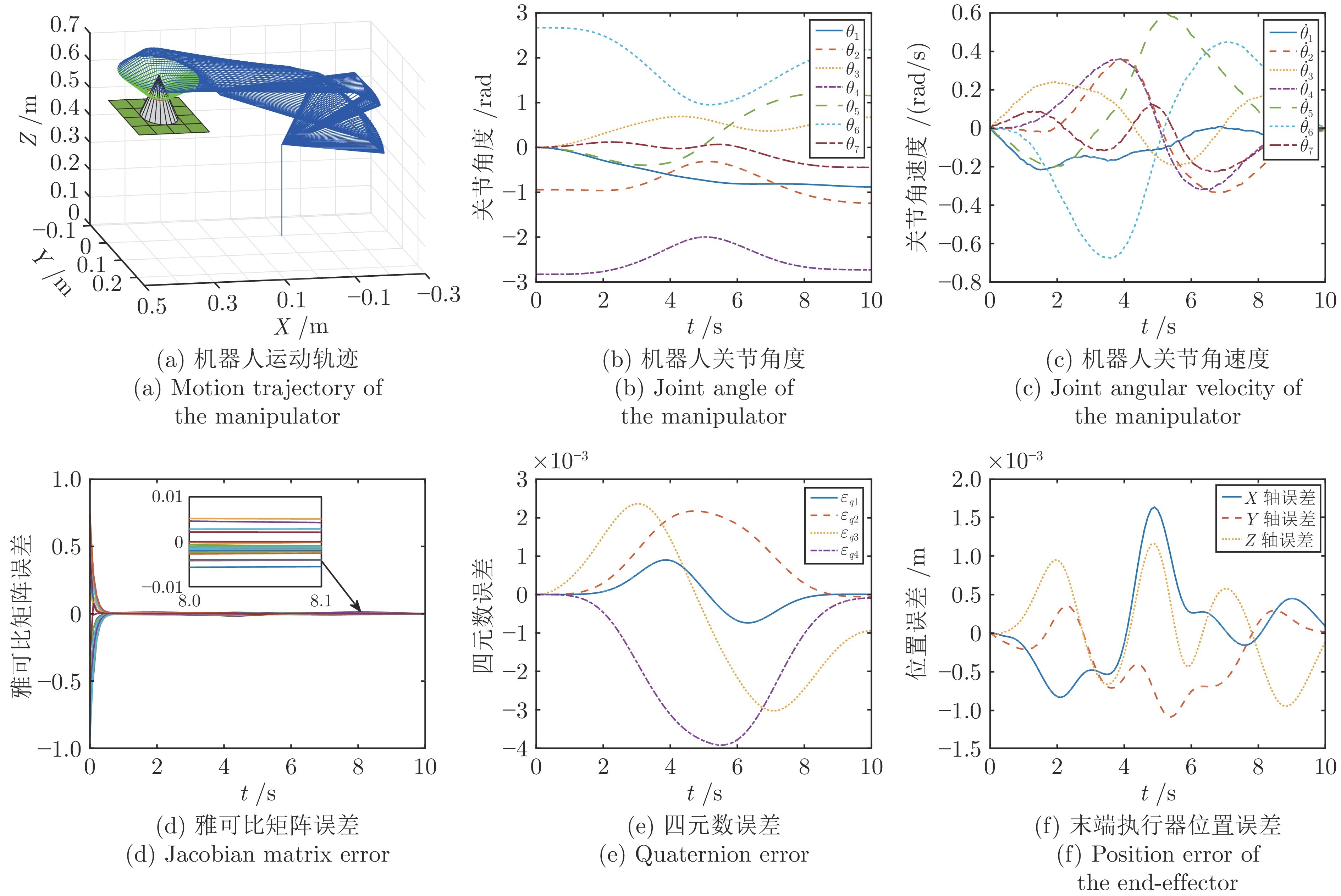
图 2 采用所提方案(14)实现冗余机器人位置与姿态跟踪的仿真结果
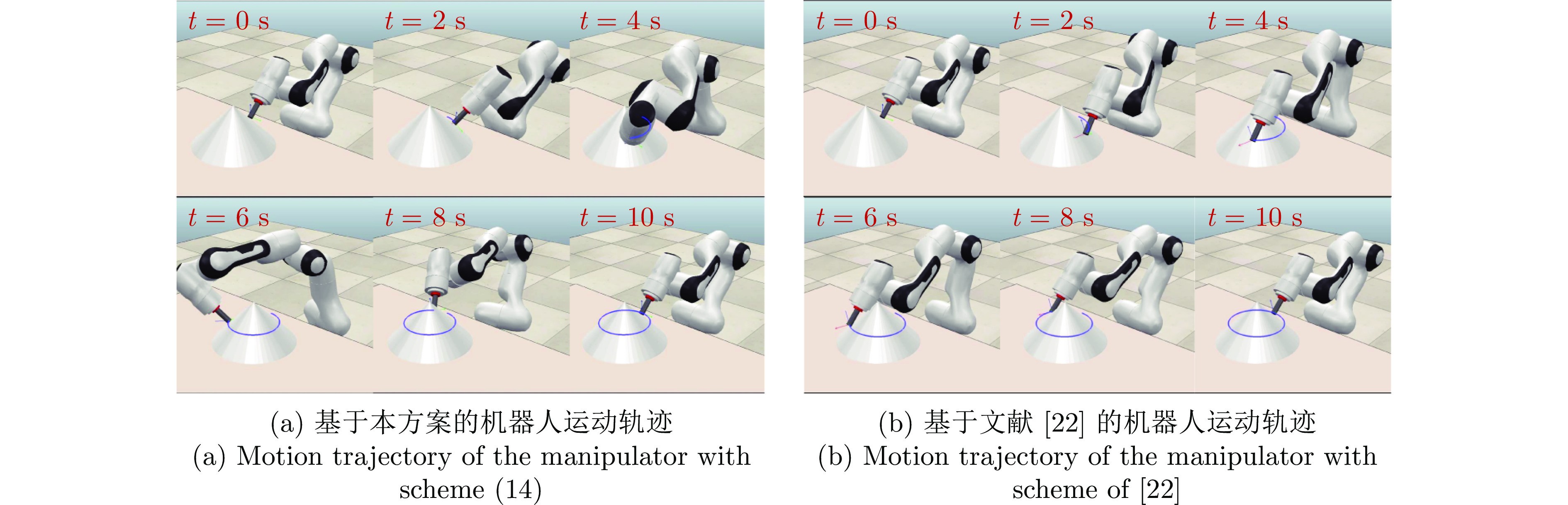
图 3 基于CoppeliaSim平台冗余机器人实现位置与姿态跟踪的对比结果
本文针对模型未知的冗余机器人提出了一种基于数据驱动的末端执行器位姿控制方案. 该方案从机器人运动学出发, 用四元数表示末端执行器的姿态, 进而实现了对末端执行器位姿控制. 通过引入数据驱动技术, 本文所提方案能够有效地控制模型未知的冗余机器人, 且估计的雅可比矩阵能够收敛至真实值. 此外, 设计了一种神经动力学方案用于本方案的求解. 理论分析证明了所提求解器的收敛性, 方案对比和仿真实验体现了所提方案对机器人末端执行器控制的优越性和有效性.
作者简介
金龙
兰州大学信息科学与工程学院教授. 主要研究方向为神经网络, 机器人技术和智能信息处理. 本文通信作者. E-mail: jinlongsysu@foxmail.com
张凡
兰州大学信息科学与工程学院硕士研究生. 主要研究方向为模型预测控制, 机器人技术和优化. E-mail: zhangfanas@foxmail.com
刘佰阳
2023年获得兰州大学信息科学与工程学院硕士学位. 主要研究方向为机器人技术和神经网络. E-mail: baiyang-liu@foxmail.com
郑宇
腾讯科技(深圳)有限公司Robotics X首席研究员. 主要研究方向为多体机器人系统, 机器人抓取与操作和机器人算法. E-mail: petezheng@tencent.com
https://wap.sciencenet.cn/blog-3291369-1428080.html
上一篇:JAS 103名专家入选爱思唯尔2023“中国高被引学者”榜单
下一篇:基于深层卷积随机配置网络的电熔镁炉工况识别方法研究