博文
欧洲科学院院士曹进德教授等:分布式自适应资源配置
|
资源配置问题,又称作经济调度问题,在近年来引起了包含云计算、传感器网络、电力网络在内的多领域、跨学科的研究兴趣。顾名思义,资源配置问题关注的是特定资源在一个网络化系统中的最优配置策略。早期的集中式调度方法需要通过一个中心枢纽节点收发系统中参与调度的各节点的信息,往往具有可扩展性差、信息安全风险高、计算效率低等弊端。近十年来,网络群体智能的发展激发了分布式资源配置算法的研究,即仅通过系统内部各节点间的局部协同实现全局最优资源配置。然而,现有的分布式资源配置算法普遍要求节点寻优步长为单位量或充分小量,一定程度上限制了算法的收敛速度。此外,现有算法普遍要求节点间具有相同的、依赖于全局通讯拓扑代数特征信息的静态耦合强度。这一策略要求系统中各节点知悉全局通讯结构,显然背离了“分布式”的初衷,且缺乏对局部结构的针对性。
在网络群体系统控制领域,分布式自适应控制在一致性、协同跟踪、包含、编队等控制问题中展现出“完全分布式”特性,即不依赖于任何全局信息的自适应耦合控制。然而,分布式自适应资源配置算法的设计与分析悬而未决:其主要挑战在于局部寻优进程与拉格朗日乘子一致性进程间的相互作用增加了分布式自适应算法设计的难度。
成果介绍
俄罗斯科学院院士、欧洲科学院院士、IEEE Fellow、东南大学曹进德教授及其合作团队提出了权重平衡有向图上的分布式自适应资源配置策略。通过引入自适应耦合增益调节机制,提出了两类分别基于有向支撑树与基于节点的自适应资源配置算法。两类算法具有可调节的标量局部寻优步长,同时不依赖于全局通讯拓扑代数特征信息。研究成果发表于IEEE/CAA Journal of Automatica Sinica 2023年第十卷第十二期:D. D. Yue, S. Baldi, J. D. Cao, Q. Li, and B. De Schutter, “Distributed adaptive resource allocation: An uncertain saddle-point dynamics viewpoint,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 12, pp. 2209–2221, Dec. 2023. doi: 10.1109/JAS.2023.123402
研究首先表明,分布式资源配置问题的最优解与一类非确定性鞍点动力系统的广义平衡点具有密切联系。进而,提出了两类分布式自适应资源配置算法,分别为基于有向支撑树与基于节点的算法,其中前者沿着通讯拓扑的有向支撑树结构设计自适应耦合增益,而后者针对每个节点设计自适应耦合增益。所提两类算法均隶属于上述非确定性鞍点动力系统,其全局收敛性在统一的框架下得到证明。最终,数值仿真与IEEE电网实例仿真验证了理论成果的有效性。
仿真阶段,分别考虑了包含6个节点与54个节点的两个网络系统,节点间的通讯拓扑如图1所示。
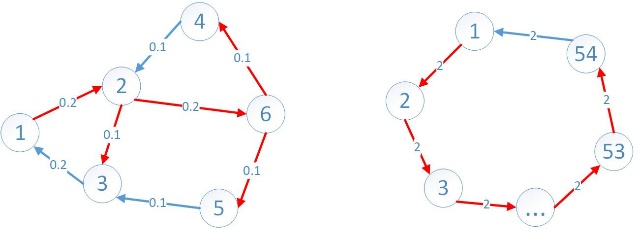
图1 权重平衡图G1与G2
(标红部分为有向支撑树)
数值仿真实验中,以6节点的网络系统(G1)、基于有向支撑树的方法为例,图2给出了分布式自适应资源配置过程,验证了理论成果的有效性。
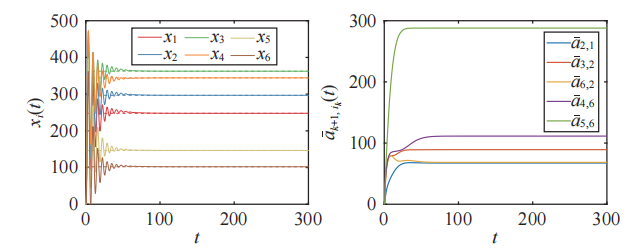
图2 基于有向支撑树的分布式自适应资源配置(左图虚线为最优解,实线为实际配置解;右图为有向支撑树各边对应的耦合增益)
电网实例验证中,以IEEE 118-bus系统发电调度任务为例,其包含54个单元(G2),共同承担定量的发电任务。图3给出了基于节点的分布式自适应电网调度过程,验证了理论成果的有效性。
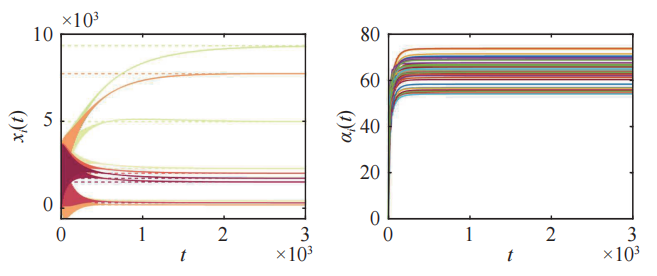
图3 基于节点的分布式自适应电网调度(左图虚线为最优解,实线为实际配置解;右图为各节点对应的耦合增益)
作者及团队

岳冬冬,东南大学博士、博士后,荷兰代尔夫特理工大学公派联合培养博士,入选2021年度博士后创新人才支持计划。先后访问日本冈山县立大学、香港科技大学。主要研究方向包括分布式自适应系统辨识、控制与优化。曾获得第18届国际网络、传感与控制会议最佳理论论文奖。

Simone Baldi,东南大学青年首席教授,国家高层次青年人才,曾任荷兰代尔夫特理工大学系统与控制研究中心助理教授。主要从事自适应控制与学习系统、机器学习、强化学习等方向的理论研究及其在无人驾驶,智能交通,智慧能源,航空航天等领域的应用。曾获得荷兰能源署“能源系统集成奖”,瑞典能源署“智能能源管理成就奖”,2016 Applied Energy, 2017 Automatica、2018 and 2020 IET Control Theory & Applications和2019 IEEE/CAA Journal of Automatica Sinica最佳审稿人奖等。

曹进德,东南大学首席教授、数学学院院长、理学部主任、江苏国家应用数学(东南大学)中心主任、江苏省网络群体智能重点实验室主任。首届全国创新争先奖获得者,享受国务院政府特殊津贴。先后当选为俄罗斯科学院院士、欧洲科学院院士、俄罗斯工程院院士、欧洲科学与艺术院院士、立陶宛科学院院士、非洲科学院院士、巴基斯坦科学院院士、国际系统与控制科学院院士和IEEE Fellow等。长期从事复杂网络与复杂系统、神经动力学与优化和工程稳定性等研究,先后主持国家重点研发计划项目1项,国家自然科学基金项目9项(含重点项目),教育部博士点基金3项。

李奇,东南大学教授,享受国务院政府特殊津贴。现任南京市政协副主席,九三学社省委副主委、监督委主任、南京市委主委。曾任东南大学自动化学院院长、江苏省科学技术厅副厅长。2003年8月-2004年8月,应诺贝尔奖获得者丁肇中教授邀请,在美国麻省理工学院进行高级访问研究,参与国际空间站阿尔法磁谱仪(AMS-02)研制。2009年3月-2010年4月,入选江苏省第一期中青年高级管理人才海外研修班,赴美国马里兰大学学习,获工商管理硕士学位。主要研究方向为智能控制、优化方法和流程工业综合自动化等。近年来,先后主持过国家863、国家国际科技合作专项、国家自然科学基金等科研项目30余项,SCI和EI论文收录40余篇。江苏省333工程第二批中青年科技领军人才,获省部科技进步一等奖两项,二三等奖多项。

Bart De Schutter, 荷兰代尔夫特理工大学教授,系统与控制中心主任,IEEE Fellow,IFAC Fellow,比利时鲁汶大学自然科学博士(Summa Cum Laude,最优等)。主要研究方向包含离散事件系统与混杂系统控制、多层级与分布式控制、智能交通系统与智慧基建系统。任IEEE Transactions on Intelligent Transportation Systems高级主编、IEEE Transactions on Automatic Control副主编。
感谢本文作者提供以上简介
https://wap.sciencenet.cn/blog-3291369-1418611.html
上一篇:基于RRT森林算法的高层消防多无人机室内协同路径规划
下一篇:基于无监督深度模型迁移的滚动轴承寿命预测方法