博文
平行车联网:基于ACP的智能车辆网联管理与控制
|
引用本文
王晓, 要婷婷, 韩双双, 曹东璞, 王飞跃. 平行车联网:基于ACP的智能车辆网联管理与控制. 自动化学报, 2018, 44(8): 1391-1404. doi: 10.16383/j.aas.2018.c170463
WANG Xiao, YAO Ting-Ting, HAN Shuang-Shuang, CAO Dong-Pu, WANG Fei-Yue. Parallel Internet of Vehicles:The ACP-based Networked Management and Control for Intelligent Vehicles. ACTA AUTOMATICA SINICA, 2018, 44(8): 1391-1404. doi: 10.16383/j.aas.2018.c170463
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170463
关键词
平行智能,平行车联网,智能交通系统,计算实验
摘要
本文将平行智能方法引入智能车辆的网联化管理与控制, 提出平行车联网的概念、框架、功能与流程.平行车联网致力于通过人工车联网与物理车联网的虚实互动、协同演化与闭环反馈, 为人-车-路-智能交通信息网一体化的智能交通系统增加计算实验与平行引导的功能, 实现描述、预测与引导相结合的车联网智能, 有效解决异构、移动、融合的交通网络环境下智能车辆的管理与控制问题.
文章导读
智能交通系统(Intelligent transportation systems, ITS)[1]是将先进的人工智能技术、信息处理技术、数据通讯传输技术、电子传感技术、电子控制技术及计算机处理技术等有效地集成运用于整个地面交通管理系统而建立的一种全方位、全天候、实时、准确、高效的综合交通运输管理系统. ITS能有效地利用现有交通设施、减少交通负荷和环境污染、保证交通安全、提高运输效率、促进社会经济发展、提高人民生活质量, 并因推动社会信息化及新产业形成而受到各国的重视.
车联网是物联网技术在智能交通中的应用[2].近年来, 随着车辆智能化与无人驾驶技术的发展, 车辆对于周围环境的感知能力、车载终端的计算与规划能力显著增强, 信息在车与车、车与人、车与路之间共享和传输的实现, 为智能交通的全面管理与控制提供了新的科学思路与技术手段[3].然而, 车联网系统涉及到动态交通场景中人-车-路的信息传输、交互、重组、后台数据分析、决策支持等多个过程.一方面, 驾驶员心理与行为的高突变性、不确定性、动态性为人与车、车与车、车与外部环境的交互引入了新的复杂因素; 另一方面, 车内网、车际网与车载移动网络的合成不可避免地引入了社会信号[4], 使车联网成为一个典型的社会物理信息系统(Cyber-physical-social systems, CPSS)[5-6].不同于传统的物理信息系统(Cyber-physical systems, CPS), CPSS将人及其心理和组织的因素纳入系统之中, 极大地提高了系统的建模复杂性, 成为约束车联网智能化水平的一大瓶颈.
复杂系统管理与控制国家重点实验室王飞跃研究员2004年提出的"平行系统方法与复杂系统的管理和控制"[7]一文为应对复杂系统难以建模与实验不足等问题提出了新的研究思路:集人工系统(Artificial systems, A)、计算实验(Computational experiments, C)、平行执行(Parallel execution, P)为一体的ACP平行智能方法体系.它通过数据驱动的描述智能、实验驱动的预测智能、虚实互动反馈的引导智能, 为不定、多样和复杂问题(Uncertainty, diversity, complexity, UDC)提供灵捷、聚焦和收敛(Agility, focus, convergence, AFC)的解决方案, 为解决复杂CPSS系统的建模、计算、评估与管理提供有效途径.近年来, 基于ACP的平行智能方法不断在实践中得以完善, 逐渐发展出了平行视觉[8]、平行感知[9]、平行数据[10]、平行情报[11-12]、平行学习[13]的理论与对应方法, 在交通[14-17]、物流[18-19]、农业[20]、能源[21]、医疗健康[22-24]、机器人[25]、区块链[26-27]、无人驾驶[28-29]等领域得到了广泛应用, 并取得了显著的效果.
为此, 本文尝试将平行智能这一本世纪初提出的原创性研究范式引入车联网领域, 以有效解决时变、异质、复杂交通环境下车联网的建模、规划与决策、优化管理等问题.本文结构安排如下, 首先详解平行智能的概念、框架、哲学基础与科学思维; 随后着重介绍了平行智能在平行交通领域的探索与实践; 在此基础上, 将平行智能的架构与体系与车联网深度融合, 提出平行车联网的概念体系, 阐述基于ACP方法的平行车联网的框架、功能与流程; 最后对本文工作进行总结, 展望未来趋势.
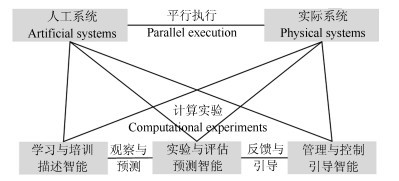
图 1 基于ACP的平行智能架构体系
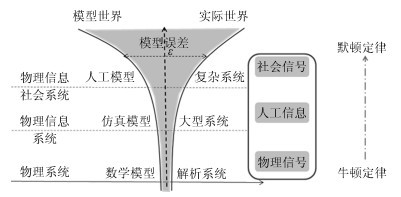
图 2 复杂系统的建模鸿沟
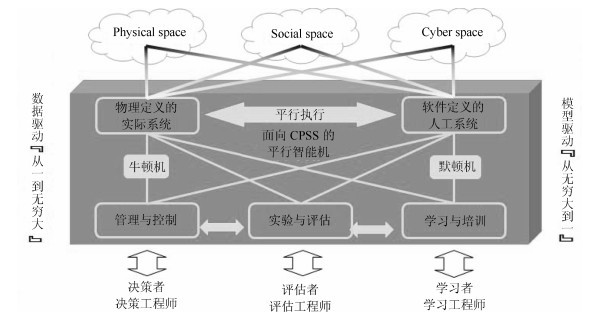
图 3 面向CPSS的平行智能体系架构
本文从CPSS的角度对车联网进行系统化分析, 将平行智能理论与ACP方法推广应用于车联网领域, 提出了一种新型的平行车联网架构, 并对其构建方法进行了深入探讨.平行车联网综合数据挖掘、机器学习、人工智能、虚拟现实、知识自动化等技术, 综合考虑信息、心理、仿真、决策的多元融合, 以可计算、可实现、可比较的方式对复杂车联网系统不同层次的结构和功能特性进行解析, 为未来交通的智能管理与控制提供了新思路及方法.
然而, 车联网是一种涉及到多方个体行为的复杂系统, 引导策略最终是否生效与驾驶员、管理员是否完全按方案执行有很大关系.在实际车联网中, 用户由于主观或者客观因素, 并非一定会完全按照车联网的优化方案执行, 如何计算并根据社会可接受度(Social acceptance)来灵活调整和分配可用资源、发布引导信息将是平行车辆网需要解决的最具挑战且重要的问题之一.
现阶段, 平行驾驶、平行学习与平行测试的研究已经引起了国际同行的高度重视, 随着相关技术的进一步发展, 平行车联网作为一个集成验证平台, 必将成为未来智能交通系统研究的一个重要方向.结合不断发展的无人驾驶技术与日益丰富的业务需求, 平行车联网将会有更为广阔的研究空间与更具潜力的应用前景.
作者简介
王晓
中国科学院自动化研究所复杂系统管理与控制国家重点实验室助理研究员.2016年获得中国科学院大学社会计算博士学位.研究方向为社会交通, 动态网群组织, 人工智能和社交网络分析.E-mail:x.wang@ia.ac.cn
要婷婷
中国科学院自动化研究所复杂系统管理与控制国家重点实验室工程师.2015年、2016年分别获得英国伯明翰大学、北京交通大学硕士学位.主要研究方向为平行驾驶与数据挖掘.E-mail:tingting.yao@ia.ac.cn
韩双双
中国科学院自动化研究所复杂系统管理与控制国家重点实验室助理研究员.2013年获得加拿大阿尔伯塔大学博士学位.主要研究方向为平行网络、物联网、智能交通、无线通信关键技术.E-mail:shuangshuang.han@ia.ac.cn
曹东璞
加拿大滑铁卢大学副教授, 驾驶员认知与自动驾驶实验室主任.中国科学院自动化研究所客座研究员.主要研究方向为自动驾驶, 人车协同与平行驾驶.E-mail:dongpu@uwaterloo.ca
王飞跃
中国科学院自动化研究所复杂系统管理与控制国家重点实验室主任, 国防科技大学军事计算实验与平行系统技术研究中心主任, 中国科学院大学中国经济与社会安全研究中心主任, 青岛智能产业技术研究院院长.主要研究方向为平行系统的方法与应用, 社会计算, 平行智能以及知识自动化.本文通信作者.E-mail:feiyue.wang@ia.ac.cn
https://wap.sciencenet.cn/blog-3291369-1410678.html
上一篇:直播预告‖自动化前沿热点讲堂之第二十五讲
下一篇:基于粒子滤波的工业控制网络态势感知建模