博文
一种内反馈控制器IFC的研究与应用
|
引用本文
李军, 陈世和, 万文军, 王越超, 黄卫剑. 一种内反馈控制器IFC的研究与应用. 自动化学报, 2018, 44(9): 1706-1716. doi: 10.16383/j.aas.2018.c160815
LI Jun, CHEN Shi-He, WAN Wen-Jun, WANG Yue-Chao, HUANG Wei-Jian. An Internal Feedback Controller. ACTA AUTOMATICA SINICA, 2018, 44(9): 1706-1716. doi: 10.16383/j.aas.2018.c160815
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160815
关键词
内反馈控制器,高增益,频率特性,闭环稳定,一阶微分,一阶惯性
摘要
通过一种高增益PI控制器(High gain proportion integration,HGPI)和一种内反馈器(Internal feedback device,IFD)构造出一种内反馈控制器(Internal feedback controller,IFC).文中通过HGPI进行IFD逆变换与标称模型的分析方法,分析了IFC的控制特性.IFC较好解决了一些高性能控制器的结构复杂和难以工程化等问题.IFD采用了一种不改变实际s阶次的任意阶的内反馈结构(Internal feedback structure,IFS),对于高阶对象无需降阶处理.文中还从信号处理的角度提出了一种用于IFC降阶处理的正弦跟踪滤波器(Sinusoid tracking filter,STF),具有较小的滞后特性.文中提出的内反馈控制器IFC具有简单的结构、整定参数较少、较好的鲁棒性和较强的抗扰性,并且具有良好工程应用前景.数学分析、仿真实验(包括物理实验)和实际应用的结果进一步证实了文中所提出的内反馈控制器IFC的正确性和有效性.
文章导读
模型是现代先进控制理论的基础, 经过数十年的发展, 理论研究成果相当丰富和完善[1-3].然而, 经典PID (Proportion integration differentiation)[4-5]控制仍占据着工业过程控制的主导地位.不过PID抑制不确定性的能力至今还不是很好[6].长期以来, 围绕改进PID的各种研究一直没有间断, 如最优PID控制[7-9], 在现代先进控制理论的研究中还融入了PID算法[10-11].
将PID用于高阶对象的控制, 存在模型的降价[12-13]和参数整定[14-15]等问题.
随着各种高性能控制方法的提出, 控制器的结构也更加趋于复杂化.
为了克服PID的缺点和摆脱对象模型的束缚, 韩京清[16]提出了基于非线性最速跟踪(Nonlinear optimal tracking, NOT)的非线性跟踪微分器(Nonlinear tracking differentiator, NTD)和非线性扩张状态观测器(Nonlinear extended state observation, NESO)等.在此基础上提出了以NESO为核心的非线性自抗扰控制器(Nonlinear active disturbance rejection controller, NADRC)[16].
NADRC包括NESO的参数较多和调整比较困难, 不利于工程应用. Gao[17]在自抗扰控制器(Active disturbance rejection controller, ADRC)包括扩张状态观测器(Extended state observation, ESO)的线性化方面做了大量卓有成效的工作, 实现了线性自抗扰控制器(Linear active disturbance rejection controller, LADRC)和线性扩张状态观测器(Linear extended state observation, LESO)等, 简化了ADRC和ESO参数的调整等, 为推广ADRC的工程应用奠定了一定的基础.今天, ADRC的研究和应用成果已较为丰富[17-20], ADRC的抗扰控制效果引起了业界的关注.目前ADRC仍然难以大规模进入工业应用, 其中的原因值得思考. ADRC在抗扰控制上虽然有效, 但ADRC的结构不一定合理, 例如ADRC远比PID复杂. ADRC的最大问题在于不被工程人员普遍认可.
文献[18]给出了一种NADRC与LADRC切换的控制方法(Nonlinear/Linear active disturbance rejection controller, N/LADRC).根据给出的实验结果:在扰动幅值较小时, NADRC的性能优于LADRC; 反之在在扰动幅值较大时, LADRC的性能又反优于NADRC. NADRC与LADRC的这种差异反映出了滤波问题的重要性, 同时也反映出非线性滤波方法和线性滤波方法的各自不足.
理论上, ADRC的阶数需要与控制对象的阶数相适应.在控制工程实践中, 跨阶控制又是普遍存在的.将低阶ADRC用于高阶对象的控制, 存在抗扰性下降的问题.直接的解决方法就是增加ADRC的阶数.但是随着ADRC阶数的增加, ADRC的结构也更加趋于复杂化, 超过3阶以上ADRC的结构已经非常复杂了.另一方面, 高阶ADRC不一定具有工程意义, 例如四阶ADRC的高频增益峰值高出二阶ADRC两个数量级.因此, 将低阶ADRC用于高阶对象的控制同样存在对象模型的降价[12-13]等问题.
文献[6]指出: PID具有天生的抗扰性. PID在控制工程中的长盛不衰, 说明PID的结构是符合客观规律的, 是合理的.事实上, LADRC也是一种包含内部PID (Inside proportion integration differentiation, IPID)控制器的复合控制结构.
PID具有普遍的适应性, 而如何能够在PID控制器的基础上发挥出较好的控制特性始终是人们追求的目标.笔者通过长期工程实践的探索, 提出了一种内反馈控制器(Internal feedback controller, IFC). IFC具有简单的结构, 较少的调整参数和较好的鲁棒性, 较强的抗扰性和较强的工程适应性等, 特别是用IFC容易构造出高阶控制器.目前IFC已取得了比较满意的仿真实验和实际应用效果.
文中变量包括名称的表达具有唯一性, 可相互引用.
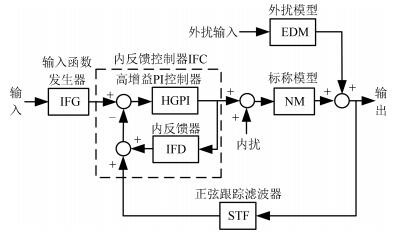
图 1 内反馈控制系统结构示意图
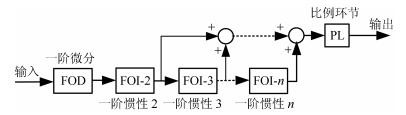
图 2 内反馈器结构示意图

图 3 内反馈控制器开环频率特性示意图
通过高增益PI控制器HGPI进行内反馈器IFD的逆变换, 实现了内反馈控制器IFC. IFC带来了诸多的好处, 再不用关心对象的阶数和降价问题, 类似PID参数整定的问题等.正弦跟踪滤波器STF较好解决了白噪声干扰滤波和滤波滞后的矛盾, 较好保证了IFC的控制特性.文中给出了IFC参数设置的简单原则. IFD还是一种对象的并联降阶器. IFC具有简单的结构, 整定参数较少, 较好的工程适应性, 较好的鲁棒性和较强的抗扰性.此外, 笔者所在的科研团队, 还进一步开展了IFC工程参数整定方法的研究实践.文中提出的IFC是对控制理论的有益发展, 具有重要的工程应用价值.数学分析、仿真实验和实际应用结果, 验证了IFC的正确性和有效性.
作者简介
陈世和
华润电力技术研究院副院长, 教授级高级工程师.主要研究方向为热工自动控制系统研究开发.E-mail:chen_shi_he@163.com
万文军
广东电科院能源技术有限责任公司高级工程师.主要研究方向为火电厂热工控制方面的试验和科研.E-mail:tansthin@163.com
王越超
广东电科院能源技术有限责任公司高级工程师.主要研究方向为热工控制和计算机应用技术.E-mail:gzcmxy@163.com
黄卫剑
广东电科院能源技术有限责任公司教授级高级工程师.主要研究方向为电厂过程自动化控制系统的开发研究.E-mail:h-w-j@163.com
李军
广东电网有限责任公司电力科学研究院工程师.主要研究方向为计算机控制与通讯.本文通信作者.E-mail:lijun_87389@126.com
https://wap.sciencenet.cn/blog-3291369-1409723.html
上一篇:基于滑模观测器和广义观测器的故障估计方法
下一篇:基于未知输入集员滤波器的不确定系统故障诊断