博文
城市污水处理过程自适应滑模控制
|
引用本文
韩红桂, 秦晨辉, 孙浩源, 乔俊飞. 城市污水处理过程自适应滑模控制. 自动化学报, 2023, 49(5): 1010−1018 doi: 10.16383/j.aas.c210798
Han Hong-Gui, Qin Chen-Hui, Sun Hao-Yuan, Qiao Jun-Fei. Adaptive sliding mode control for municipal wastewater treatment process. Acta Automatica Sinica, 2023, 49(5): 1010−1018 doi: 10.16383/j.aas.c210798
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c210798
关键词
城市污水处理过程,时滞,滑模控制,模糊神经网络
摘要
针对城市污水处理过程时滞导致难以稳定控制的问题, 提出一种自适应滑模控制方法(Adaptive sliding mode control, ASMC). 首先, 分析推流时滞对城市污水处理生化反应过程的影响, 建立时滞影响下的城市污水处理运行控制模型; 其次, 设计一种基于模糊神经网络的预估补偿模型, 完成滞后变量的准确预测, 实现控制模型中变量时刻的统一; 最后, 设计一种具有自适应开关增益系数的滑模控制器(Sliding mode control, SMC), 实现溶解氧和硝态氮的稳定控制. 将提出的自适应滑模控制方法应用于城市污水处理过程基准仿真平台, 实验结果显示该方法能够实现城市污水处理运行过程稳定控制.
文章导读
随着中国城市化进程的加快, 污水排放量逐年增加, 城市水污染问题日渐突出[1-2]. 为了提高污水利用率, 实现水资源的良性循环, 中国积极建设城市污水处理厂[3-4]. 城市污水处理过程主要包括沉砂池、初沉池、生化反应池、二沉池以及过滤池等多个环节, 其中生化反应池存在复杂的生物化学反应, 具有时滞、非线性等特性, 其稳定控制面临着极大挑战[5-7].
为了实现城市污水处理过程稳定控制, 国内外学者提出了多种控制方法[8-11]. 例如, Flores等[12]提出了一种改进型比例积分微分(Proportional integral differential, PID)控制方法, 用于城市污水处理过程好氧区溶解氧的稳定控制. 该方法基于机理模型自适应调整控制器的参数, 能够达到期望的控制效果. Samsudin等[13]针对污水处理过程提出了一种增强型比例积分(Proportional integral, PI)控制方法, 该方法可以快速响应溶解氧的浓度并降低响应过程的超调. 虽然PI/PID控制方法设计简单, 但这类控制方法依赖被控对象的模型, 模型的优劣在很大程度上会影响控制过程的稳定性. 为此, Cristea等[14]提出了一种模型预测控制方法用于曝气过程, 该方法能够放宽对模型的限制, 提高系统的稳定性. Belchior等[15]设计了一种自适应模糊控制方法, 用于稳定生化反应池好氧区的溶解氧浓度, 该方法可以根据污水处理过程的变量数据和工况条件在线更新控制器的参数, 使响应结果快速稳定在设定值附近. 以上控制方法在城市污水处理的控制过程均取得了一定的进展, 但这些方法均未考虑时滞对控制过程的影响. 事实上, 城市污水处理过程内部存在推流现象, 这种现象导致污水处理的控制过程表现出时滞特性. 时滞会导致原有系统控制性能的衰落, 甚至影响控制过程的稳定性.
近年来, 滑模控制方法因其具有动态响应快、稳定性好且设计过程简单等优点受到学者们的广泛关注[16-18]. 例如, Han等[19]针对具有时变时滞和外部干扰的不确定离散奇异系统, 提出了一种鲁棒滑模控制方法, 该方法通过自由加权矩阵和Lyapunov-Krasovskii泛函可以保证系统轨迹在有限时间内驱动到平衡点附近, 实现稳定控制. Munoz等[20]基于溶解氧的一阶模型改进了滑模控制方法, 并将其应用于序批式反应器的脱氮过程, 实验结果表明该方法能够提升控制性能. Xu等[21]提出了一种基于自适应多项式前馈预测算法的滑模控制器, 该控制器通过设计时滞补偿器抑制实时混合仿真系统中存在的时滞, 仿真实验结果表明该方法能够降低时滞影响, 提高系统的稳定裕度. 但是以上方法的控制结构相对固定, 当外界出现剧烈波动时, 会导致抑制时滞的过程变慢, 造成较大的稳态误差. 为此, Alipouri等[22]针对四容水箱设计了一种基于多步预测的高阶离散滑模控制器. 该控制器采用分布式的前向预测算法, 能够有效抑制通信时滞产生的噪声, 实现水位的稳定控制. Shah等[23]针对多入多出的非线性系统设计了一种滑模控制器, 该控制器通过帕德近似方法补偿过程时滞导致的数据不匹配问题, 实验结果表明, 该控制器能够克服过程时滞的影响, 使系统具有较好的响应性能. 尽管上述滑模控制方法在非线性系统的稳定控制方面均取得了良好的控制效果, 但这些方法针对的系统时滞相对较小. 然而, 实际污水处理过程一般每15分钟对数据进行一次存储, 致使数据库中两个相邻分区的变量数据间隔差一般在15分钟到45分钟之间, 故城市污水处理的控制过程是一种时滞较大的复杂工业过程, 上述控制方法难以直接应用.
为此, 本文分析了推流时滞的成因及其对生化反应过程造成的影响, 建立了受推流时滞影响的污水处理运行控制模型, 并结合滑模控制稳定性好的优点, 提出了一种自适应滑模控制(Adaptive sliding model control, ASMC)方法, 以削弱城市污水处理过程推流时滞对控制过程的影响. 该方法主要有以下两点优势:
1)受城市污水处理过程非线性特点的影响, 本文通过模糊神经网络预估运行控制模型中的滞后变量, 能够将运行控制模型中的变量时刻统一到当前时刻, 削弱时滞的影响;
2)基于模糊神经网络补偿后的运行控制模型, 设计了一种基于自适应开关增益系数的滑模控制器, 以增强控制系统的稳定性.
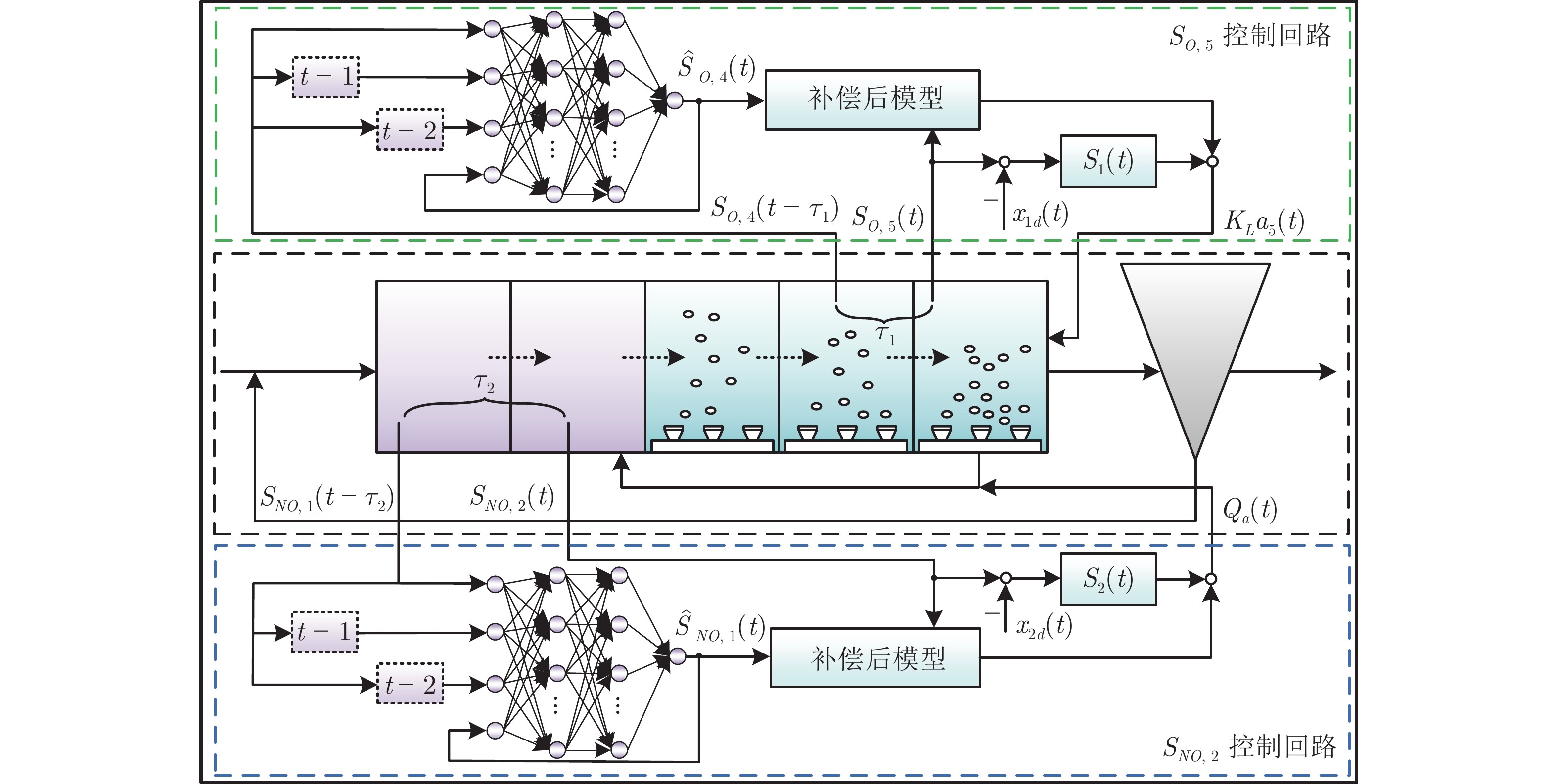
图 1 自适应滑模控制器结构
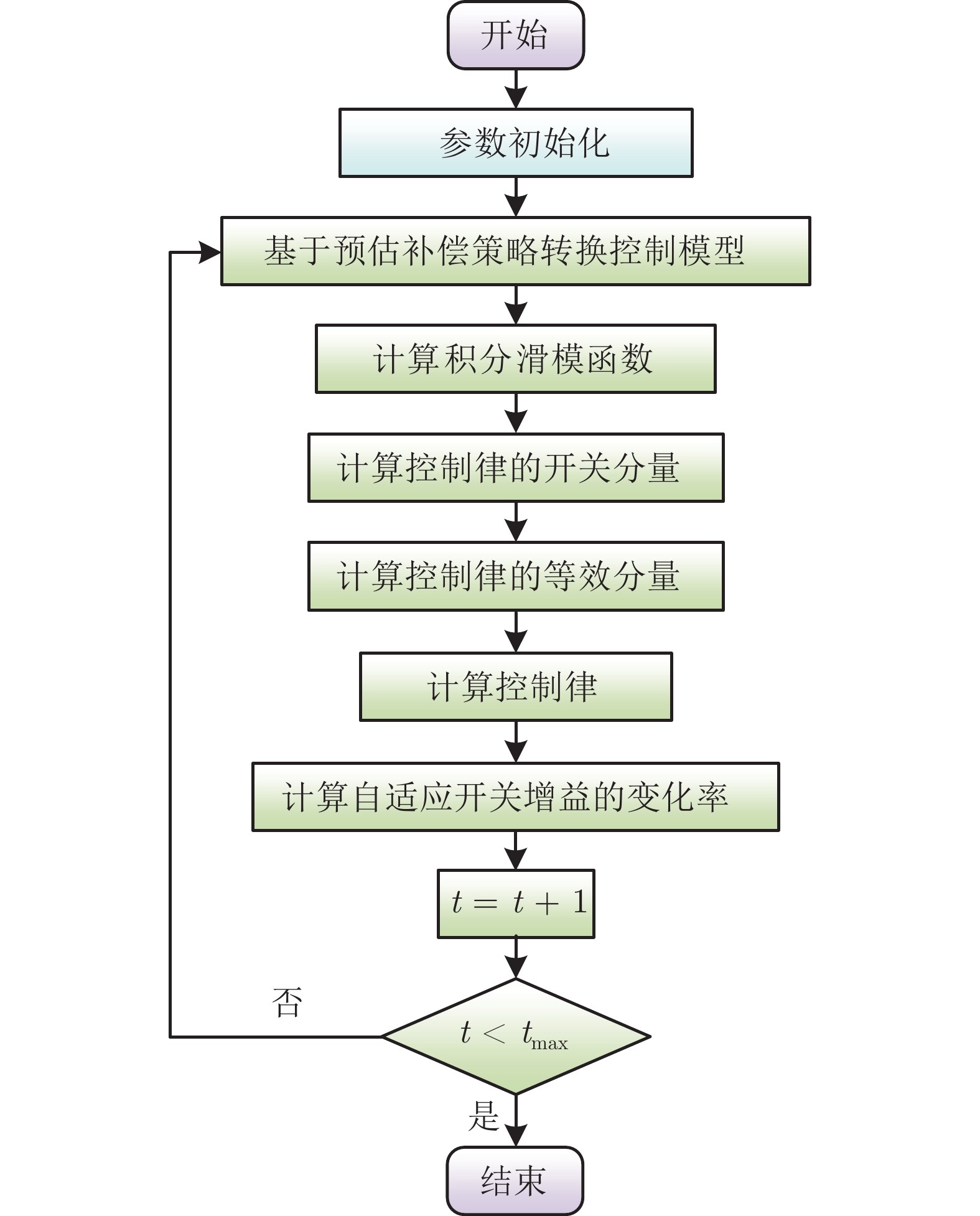
图 2 自适应滑模控制求解过程
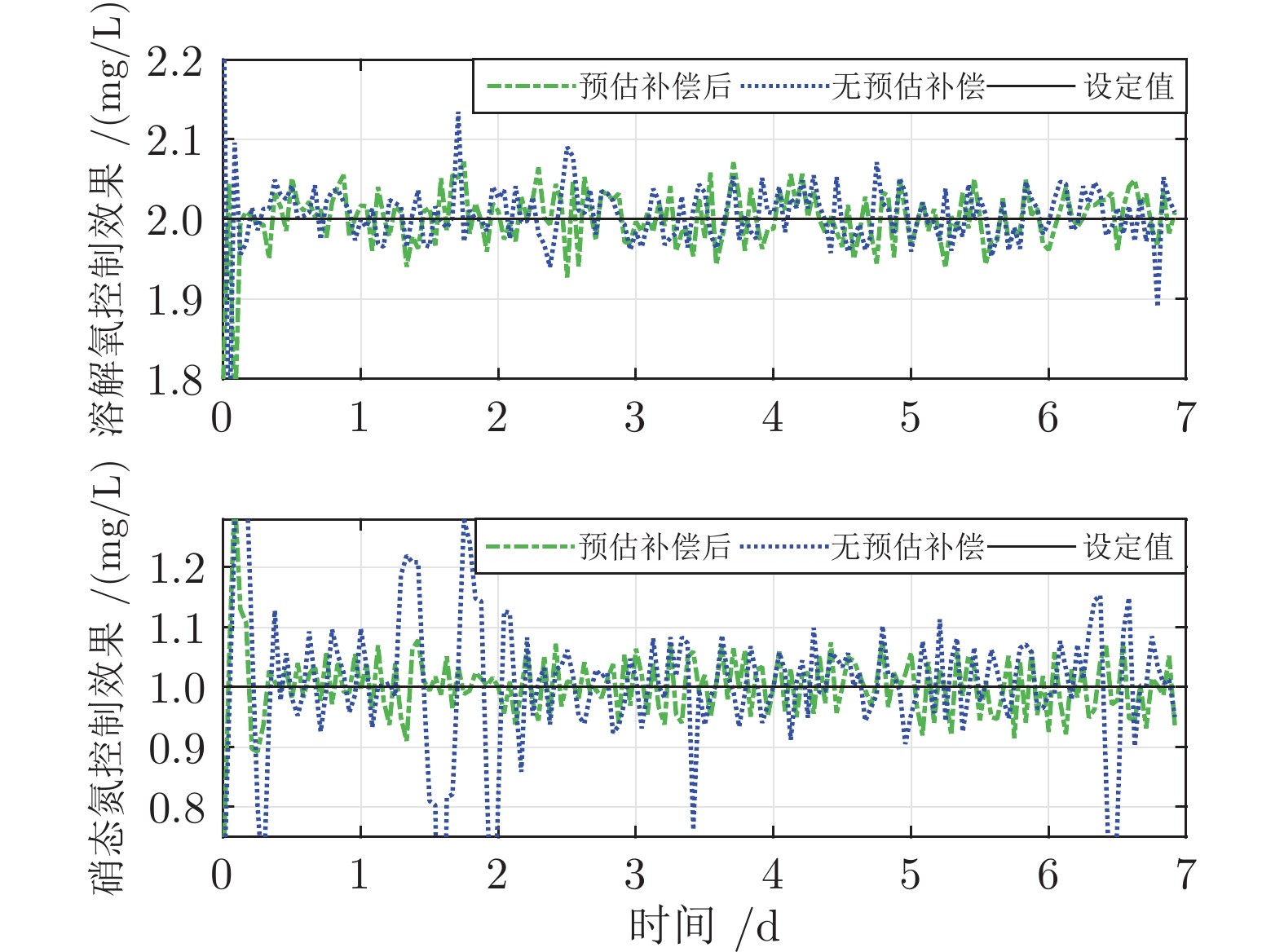
图 3 溶解氧和硝态氮控制效果 (晴天天气且设定值恒定)
针对时滞影响城市污水处理过程稳定控制的问题, 本文提出了一种自适应滑模控制方法. 本文的主要工作可以概括为以下四点:
1)针对城市污水处理过程的关键被控变量溶解氧和硝态氮, 本文分析了时滞的成因以及对生化反应过程造成的影响, 建立了受推流时滞影响的运行控制模型.
2)由于城市污水处理过程具有非线性的特性, 本文设计了一种基于模糊神经网络的预估补偿模型, 该模型能够统一控制模型中的变量时刻, 降低时滞的影响.
3)本文设计了一种基于自适应开关增益系数的滑模控制器, 实现了溶解氧和硝态氮的稳定控制.
4)通过BSM1仿真平台, 验证本文提出的控制方法, 并设置了对比实验, 实验结果显示了本文方法的有效性.
然而, 本文方法尚存在一定的局限性需要进一步的探索, 例如本文基于国际水协会提出的BSM1模型建立了推流时滞影响下的运行控制模型. 由于实际污水处理过程运行环境复杂, 该模型可能不能完全反映实际污水处理过程的真实情况. 因此, 如何仅依靠过程数据辨识推流时滞影响下的运行控制模型仍是一个待解决的问题.
作者简介
韩红桂
北京工业大学信息学部教授. 主要研究方向为城市污水处理过程智能优化控制, 神经网络结构设计与优化. 本文通信作者. E-mail: rechardhan@bjut.edu.cn
秦晨辉
北京工业大学信息学部硕士研究生. 主要研究方向为城市污水处理过程智能控制. E-mail: qinchenqinchen123@163.com
孙浩源
北京工业大学信息学部讲师. 主要研究方向为城市污水处理网络化控制, 随机采样控制. E-mail: sunhaoyuan@bjut.edu.cn
乔俊飞
北京工业大学信息学部教授. 主要研究方向为城市污水处理过程智能优化控制, 神经网络结构设计与优化. E-mail: adqiao@bjut.edu.cn
https://wap.sciencenet.cn/blog-3291369-1391527.html
上一篇:基于RAGAN的工业过程运行指标前馈−反馈多步校正
下一篇:基于边缘特征增强的任意形状文本检测网络