博文
软体机械臂水下自适应鲁棒视觉伺服
|
引用本文
徐璠, 王贺升. 软体机械臂水下自适应鲁棒视觉伺服. 自动化学报, 2023, 49(4): 744−753 doi: 10.16383/j.aas.c200457
Xu Fan, Wang He-Sheng. Adaptive robust visual servoing control of a soft manipulator in underwater environment. Acta Automatica Sinica, 2023, 49(4): 744−753 doi: 10.16383/j.aas.c200457
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200457
关键词
软体机器人,自适应鲁棒控制,无标定视觉伺服,水下视觉伺服
摘要
水下仿生软体机器人在水底环境勘测, 水下生物观测等方面具有极高的应用价值. 为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果, 提出一种自适应鲁棒视觉伺服控制方法, 实现其在干扰无标定环境中的高精度镇定控制. 基于水底动力学模型, 设计保证动力学稳定的控制器; 针对柔性材料离线标定过程繁琐、成本高, 提出材料参数自适应估计算法; 针对水下特殊工作条件, 设计自适应鲁棒视觉伺服控制器, 实现折射效应的在线补偿, 并通过自适应未知环境干扰上界, 避免先验环境信息的求解. 所提算法在软体机器人样机中验证其镇定控制性能, 为仿生软体机器人的实际应用提供理论基础.
文章导读
仿生软体机器人在非结构化环境中具有良好的应用前景. 近年来, 受海洋生物的外形结构特性与运动机理的启发, 科学家们设计并制造了不同性状的水下软体机器人系统, 它们具有类似章鱼臂、海星、鱼鳍等外形, 在水下抓取、水下生物观察、水底环境探索、救援、导航等任务中展现了巨大应用价值[1-2]. 然而水下环境的特殊性, 如存在较强的外部水流干扰和环境不确定性, 制约了该类软体机器人的控制效果. 除此之外, 软体机器人本身的复杂非线性材料特性也提升了系统建模难度, 增加基于模型控制算法设计的难度. 针对上述两个问题, 本文提出自适应鲁棒视觉伺服, 设计非线性材料参数在线估计算法, 简化离线建模步骤; 针对水下环境特殊光学条件和未知干扰, 设计折射影响的在线补偿和未知水流干扰上界自适应估计算法, 避免了水下相机复杂繁琐的标定过程和对外界环境先验信息的求解, 实现此类环境中鲁棒视觉伺服控制.
精确的系统模型是保证基于模型的闭环控制器良好性能的前提. 软体机器人所独有的柔性机构虽然赋予了其极好的环境适应与安全交互能力, 但同时也增加了这类机器人的建模难度: 非线性柔性材料增加了系统的耦合效应, 需要额外考虑形状参数与系统输入力和外部作用力之间的非线性映射关系. 近十年来, 许多科学家致力于软体机器人系统的精确动力学模型研究. 相关研究可归为连续性建模[3-4]、离散化建模[5-6]、有限元建模[7]和基于数据驱动的模型学习[8]几个方面. 在上述方法中, 离散化模型更加适用于实时闭环控制任务. 本文采用基于凯恩方法(Kane's method)建立的水下动力学模型(离散化模型)[9]. 该模型考虑了外部水流作用对软体机械臂运动状态的影响, 并基于粘弹性材料本构方程建模因软体机械臂形变导致的能量变化. 所求解的解析水下动力学模型中涉及内能变化项, 该项的求解需要柔性材料弹性模量和粘性系数的标定. 传统的标定过程由于柔性材料的特殊性造成标定工作复杂繁琐, 这为基于模型的视觉控制任务增加了不便. 因此本文首先设计了未知材料参数的自适应估计方法, 简化控制器设置的前期准备工作.
本文基于软体机械臂水下动力学模型, 设计了自适应图像视觉伺服镇定控制器. 视觉伺服广泛运用于刚体机器人控制任务中[10-12], 近年来, 在软体机器人控制任务中同样证明其适用性[13-14]. 然而水下干扰环境和特殊光学条件提升了视觉伺服算法的设计难度: 水流干扰导致模型不确定性增加, 降低模型精度, 进而导致控制性能下降; 水下环境造成光线的折射, 使得基于光线直线传播原理建立的相机投影模型不再适用, 同时水下环境也增加了人工离线标定工作的复杂度. 针对上述两个问题, 本文设计自适应鲁棒视觉伺服控制算法, 实现对未知相机参数、折射影响和环境干扰的在线估计, 避免水下相机离线标定和传统鲁棒控制中对外界扰动的先验信息求解, 在保证控制器性能的同时进一步简化控制任务流程. 精确的视觉伺服控制算法的关键是建立精确的图像速度−机器人关节速度的映射模型, 该模型依赖于相机内外参数的标定. 考虑水下环境的特殊性, 传统的离线标定方法要求更高的人力成本. 研究者提出不同方法以简化相机离线标定工作. 文献[15]提出基于“深度独立交互矩阵”速度映射线性化方法, 从而实现未知相机参数的自适应估计. 但此类研究基于同种介质中光线直线传播原理所构建的相机模型, 未考虑光线偏折情况下的视觉测量问题, 不适用于水下视觉伺服任务. 除此之外, 基于Broyden[16]方法的图像雅可比估计和扩展卡尔曼滤波[17]的方法也被证实可以解决未标定图像视觉伺服问题, 但由于水下相机模型非线性程度提升, 可能导致此类图像雅可比矩阵估计方法误差加大, 降低视觉伺服控制性能. 针对水下相机标定, 文献[18-19]提出将折射影响等同于镜头畸变问题, 并通过标定畸变参数消除水下折射的影响. 布朗模型(Brown's model)[20]广泛用来表征镜头畸变影响, 它以多项式函数的形式对失真效应进行数学描述, 具有精度要求与计算复杂度兼顾的特点. 在文献[18-19]中, 这一模型被用来表征因折射导致的图像变形、像素点坐标测量存在偏差的问题. 关于畸变模型求解的问题, 现有研究大都基于两步法, 通过离线非线性数值优化方法来计算模型中出现的未知系数[21-22], 这一方法要求极大的计算量, 且不可避免地导致离线标定误差. 本文同样采用畸变模型来解释水下折射现象, 并通过估计该模型实现在线折射影响的补偿. 为了简化水下相机标定工作, 我们采用基于复合未知参数估计的在线自适应方法, 通过设计自适应估计器, 解决了水下无标定视觉伺服问题. 除此之外, 本文提出水下环境干扰上界的自适应估计算法, 相比于传统的鲁棒控制器中需预估干扰范围的前提[23], 进一步避免了求解环境先验信息的步骤.
本文采用自适应图像视觉伺服方法, 解决了仿章鱼软体机械臂无标定水下视觉伺服问题, 并针对环境干扰设计自适应鲁棒算法, 提升控制系统稳定性. 本文主要贡献可概括为以下两个方面:
1) 针对软体机器人材料模型的特殊性导致动力学模型求解困难、动力学控制实用性降低的问题, 本文采用自适应方法在线估计柔性材料参数, 避免在确定机器人系统动力学模型时, 所必须的繁琐的材料参数预标定过程, 简化软体机器人动力学控制器设计.
2) 针对水下特殊环境导致光学条件变化造成传统自适应方法不适用, 和水下环境中存在未知且变化范围难以确定的水流干扰造成系统稳定性降低两个问题, 提出基于畸变模型估计的折射效应补偿和基于未知水下环境扰动范围估计相结合的自适应鲁棒视觉伺服算法, 避免水下相机标定和对水流干扰变化范围求解过程, 解决了水下鲁棒视觉伺服控制问题.
本文的组织结构如下: 第1节和第2节分别给出软体机械臂的动力学模型和视觉伺服算法所采用的透视投影模型的简要介绍. 在第3节中, 详细介绍了所设计的自适应鲁棒控制算法, 并给出稳定性证明. 第4节通过实验验证了所提算法的可行性, 并对实验结果加以分析. 第5节对研究内容做出总结, 并对当前存在问题进行讨论. 最后, 在附录A中给出了所提未知干扰上界自适应方法的一般性证明.

图 1 原型样机简图

图 2 水下相机模型
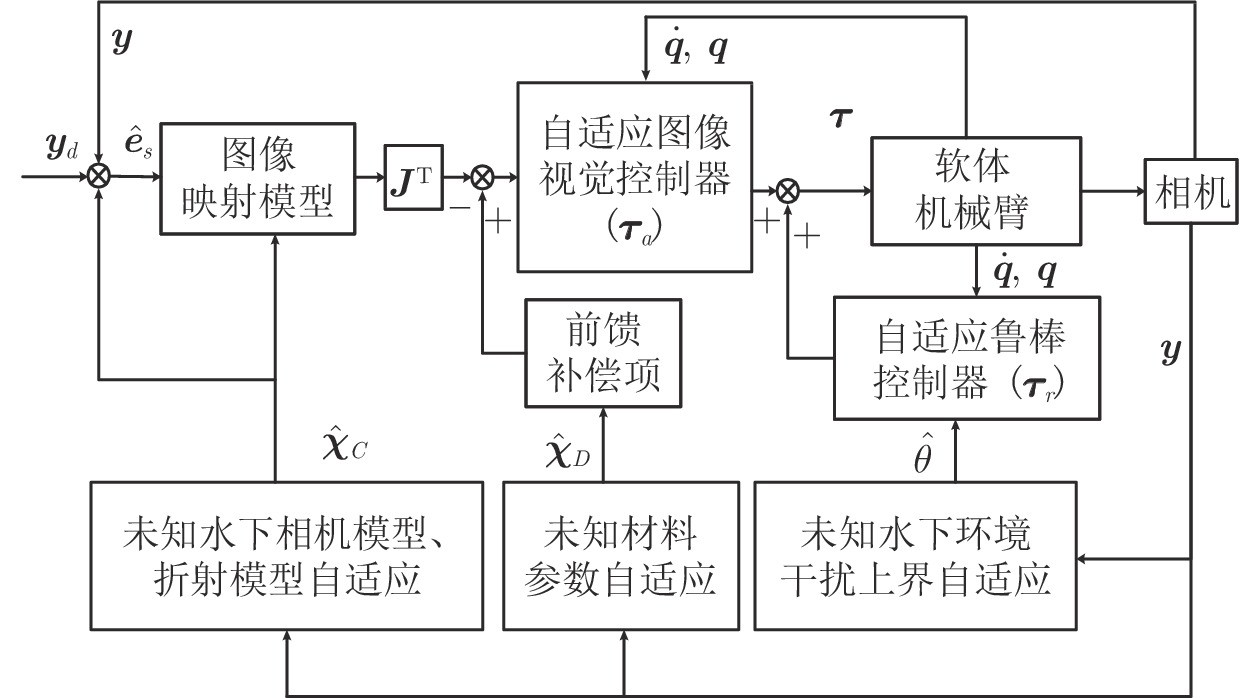
图 3 控制器简图
本文提出仿生软体机械臂自适应鲁棒视觉伺服算法. 该算法通过在线估计软体机械臂未知材料参数, 避免高成本复杂非线性材料参数标定过程; 基于自适应方法在线补偿水下折射影响, 避免繁琐水下相机标定, 简化了传统视觉伺服控制器设置过程; 通过设计未知干扰上界的自适应估计算法, 避免对外界环境先验信息的求解. 所提方法在实验中展现了良好的镇定控制效果, 证明其对水下仿生软体机器人的精确运动控制能力. 在未来研究中, 我们将继续探寻软体机械臂在更加复杂控制任务中的工作能力, 如跟踪控制、交互控制等, 从理论与实验结合的角度进一步提升软体机械臂的应用价值.
作者简介
徐璠
上海交通大学电子信息与电气工程学院自动化系博士研究生. 主要研究方向为软体机器人和视觉伺服. E-mail: xufan_1993@sjtu.edu.cn
王贺升
上海交通大学电子信息与电气工程学院自动化系教授. 主要研究方向为视觉伺服, 服务机器人, 机器人控制, 自动驾驶. 本文通信作者. E-mail: wanghesheng@sjtu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1388391.html
上一篇:一种基于区块链的DNSSEC公钥验证机制
下一篇:面向高比例新能源电网的重大耗能企业需求响应调度