博文
基于多目标均方误差界的多传感器控制算法
|
引用本文
连峰, 侯利明, 刘静, 韩崇昭.基于多目标均方误差界的多传感器控制算法.自动化学报, 2020, 46(10): 2177-2190 doi: 10.16383/j.aas.c180251
Lian Feng, Hou Li-Ming, Liu Jing, Han Chong-Zhao. Multi-sensor control based on multi-target mean square error bound. Acta Automatica Sinica, 2020, 46(10): 2177-2190 doi: 10.16383/j.aas.c180251
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180251
关键词
多传感器控制,标签随机有限集,多目标跟踪,贝叶斯估计,误差界
摘要
提出了一种新的基于集中式处理结构的有约束多传感器控制算法.该算法将多目标均方误差界作为传感器控制的代价函数.为了应用信息不等式得到该误差界, 2阶最优子模式分配测度被用于度量状态集和其估计集间的误差, 并采用δ-广义标签多伯努利滤波器执行多目标Bayes递推.混合罚函数法和复合形法被用来降低求解该有约束优化问题的计算量.仿真结果表明对于由多个不同观测性能传感器组成的带约束条件的控制系统, 本方法的跟踪精度显著优于柯西-施瓦茨散度法; 并且当传感器个数较多时, 混合罚函数和复合形法的计算时间相比穷尽搜索法显著缩短而跟踪精度损失很小.
文章导读
在目标跟踪[1-2]领域, 传感器控制是指在通信带宽、能量或计算量等约束条件下, 通过使传感器执行一定操作以提高目标检测和估计精度.由于受目标个数和状态不确定性、测量噪声、漏检、杂波、非线性以及实时性等影响, 传感器控制相比传统控制问题更为复杂, 因而受到了广泛关注[3-5].
近年来, 随着随机有限集(Random finite set, RFS)[6]和标签RFS[7-10]在多目标滤波中的广泛应用, 相应的传感器控制方法也获得了迅猛发展. RFS的最大优势是可以将多目标跟踪和传感器控制统一描述为一个Bayes框架下部分可观测的马尔科夫决策过程(Partially observed Markov decision process, POMDP)[11].对于多目标单传感器控制问题, 近些年已取得了一些成果[12-18]; 而对于多传感器场景, 由于其复杂性显著增加, 目前仅有最大化柯西-施瓦茨(Cauchy-Schwarz, CS)散度法[19]和最小化势和状态的后验期望误差(Posterior expected error of cardinality and states, PEECS)法[20].这两种方法均基于分布式融合结构, 故必须采用广义协方差交叉(Generalized covariance intersection, GCI)[21-22]准则获得融合后的多传感器后验密度.但在GCI中各个传感器权重的设定一直没有可靠的依据, 往往凭经验而定.例如, 当传感器观测性能相同或接近时, 可将各个权重设为相同; 反之, 当传感器观测性能相差较大时, 则很难找到设定各个权重的有效方法.此外, 对于多传感器控制问题, 若采用穷尽搜索法寻找最优控制命令, 其计算代价会随传感器个数的增加而显著增长.针对该问题, Wang等[20]建议采用坐标下降法[23]来降低无约束多传感器控制的计算代价.并且除文献[18]外, 均没有考虑传感器控制的约束条件.
针对上述问题, 通过采用δ-广义标签多伯努利(δ-generalized labeled multi-bernoulli, δ-GLMB)滤波器[7]执行多目标Bayes递推, 本文提出了一种以多目标均方误差(Mean-square error, MSE)界作为代价函数且带约束条件的多传感器控制算法.此处采用2阶最优子模式分配(Optimal sub-pattern assignment, OSPA)测度[24]定义该误差距离.为了获得该误差的下界, 需要将传统应用于矢量的信息不等式扩展到RFS观测[25].由于本文误差界以直到当前时刻的具体观测集为条件, 其包含了关于目标状态实现的有用信息, 因此相比仅仅依赖于运动和观测模型的无条件界[26], 它能够提供更加准确的多目标在线估计性能, 因此也更加适用于传感器实时控制.本文方法无需采用GCI准则, 建议采用混合罚函数法[27]和复合形法[28]来降低其计算代价.仿真结果表明对于观测性能差异较大且带约束条件的多传感器控制系统, 本方法相比基于GCI的CS散度法的多目标跟踪精度有明显提高.并且对于传感器较多的场景, 在保证多目标跟踪精度损失很小的条件下, 采用所建议的子优化算法相比采用穷尽搜索法计算时间会显著缩短.
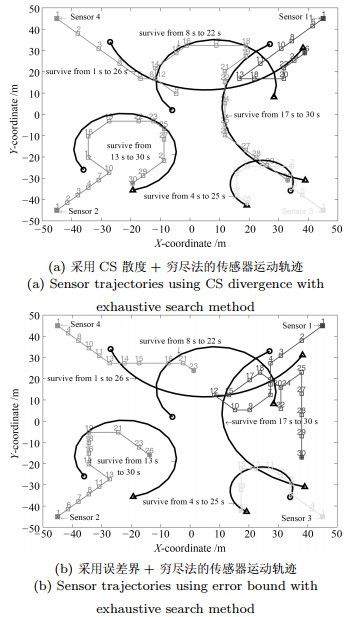
图 1 单次实验中CS散度+穷尽法和误差界+穷尽法的传感器运动轨迹

图 2 随机法、CS散度+穷尽法和误差界+穷尽法的平均OSPA误差
本文提出了一种带约束条件的针对多目标跟踪系统的多传感器控制算法.该算法以多目标MSE界作为传感器控制的代价函数.采用2阶OSPA测度定义多目标状态集和估计集的误差, 并将多目标Bayes递推建模为一个δ-GLMB RFS.为了降低计算代价, 建议采用混合罚函数法和复合形法这两种子最优的算法来替代穷尽搜索法求解该有约束的优化问题.仿真结果表明对于观测性能相差较大且有约束存在的多传感器控制系统, 本方法的多目标跟踪精度明显优于CS散度法等基于GCI准则的多传感器控制算法.并且当传感器个数较多时, 采用所建议的子最优算法相比采用穷尽搜索法, 其计算时间显著缩短而最终的多目标跟踪精度损失很小.
作者简介
侯利明
西安交通大学自动化科学与工程学院博士研究生.主要研究方向为目标跟踪, 信息融合, 传感器管理.
E-mail: hliming2017@stu.xjtu.edu.cn
刘静
西安交通大学自动化科学与工程学院教授.主要研究方向为压缩感知与信息融合.
E-mail: elelj20080730@gmail.com
韩崇昭
西安交通大学自动化科学与工程学院教授.主要研究方向为多源信息融合, 随机控制与自适应控制, 非线性频谱分析.
E-mail: czhan@mail.xjtu.edu.cn
连峰
西安交通大学自动化科学与工程学院教授.主要研究方向为目标跟踪, 信息融合, 传感器管理.本文通信作者.
E-mail: lianfeng1981@xjtu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1374706.html
上一篇:基于透镜成像学习策略的灰狼优化算法
下一篇:【当期目录】IEEE/CAA JAS 第10卷 第1期