博文
平行设计:面向平行制造体系的非标机械方案设计流程
||
参考文献:
李诗濛, 王飞跃. 平行设计:面向平行制造体系的非标机械方案设计流程. 智能科学与技术学报[J], 2023, 5(2): 274-282 doi:10.11959/j.issn.2096-6652.202323
LI Shimeng. Parallel design: non-standard mechanical scheme design procedure in parallel manufacturing. Chinese Journal of Intelligent Science and Technology[J], 2023, 5(2): 274-282 doi:10.11959/j.issn.2096-6652.202323
平行设计:面向平行制造体系的非标机械方案设计流程
李诗濛, 王飞跃
摘要:平行制造是将信息化、自动化以及人工智能与制造业深度融合的崭新产业制造范式。阐述了在平行制造体系中非标机械方案的设计流程,将平行设计流程作为面向平行制造体系的嵌套平行系统,提出了基于标准化流程与拟真流程的ACP方法,定义了产品设计的社会价值向量与社会价值趋势矩阵,对平行制造中的社会物理信息系统(CPSS)数据进行有效利用。此外,还展示了非标机械方案“星轮减速器”在平行设计中的应用案例。
关键词: 平行制造 ; ACP方法 ; 社会物理信息系统 ; 星轮减速器 ; 平行智能
Parallel design: non-standard mechanical scheme design procedure in parallel manufacturing
LI Shimeng, WANG Fei-Yue
Abstract: Parallel manufacturing is a new manufacturing form in industry, deeply integrating informalization, automation, and AI.In this paper we illustrated the procedure of non-standard mechanical design in parallel manufacturing, claiming it a nested parallel system.We proposed the ACP method based on the standard procedure and the emulated procedure, and defined the social-value-vector and trended-social-value-matrix so as to take the advantage of data in CPSS.We also presented Xinglun robot speed reducer as a case study of non-standard mechanical design in parallel design.
Keywords: parallel manufacturing ; ACP method ; CPSS ; Xinglun robot speed reducer ; parallel intellegence
0 引言
自改革开放以来,我国的机械设计制造业得到了迅速发展,如今信息化技术正是我国在机械行业进行突破的一个契机。目前在机械行业内,基于信息化环境的主要应用有:集成化系统、智能设计、柔性自动化、数控技术、信息化处理等[1,2,3,4]。总体来看,我国机械自动化技术尚处于初级阶段,机械行业自动化程度有限,信息化融合程度低,没有构建完整的自动化管理和计算机辅助系统,影响了自主研发能力的提升。
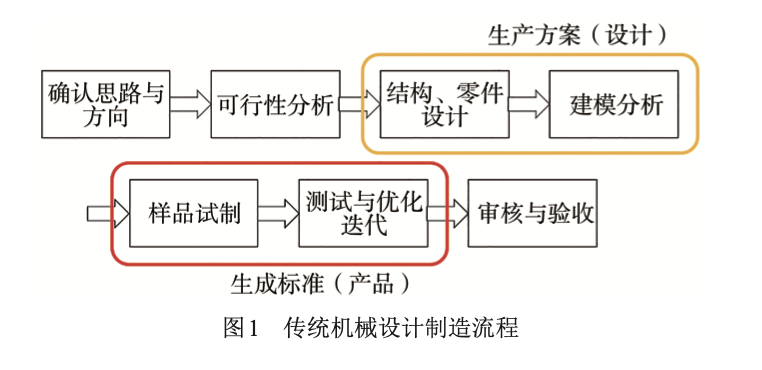
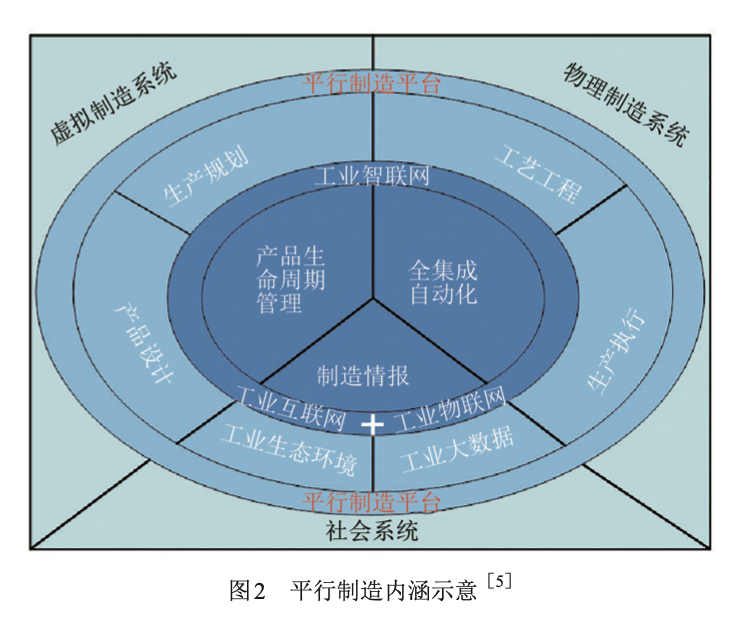
针对制造业中的信息化与智能化融合问题,中国科学院自动化研究所的王飞跃研究员[5]提出了基于平行系统,名为“平行制造”的智能制造新范式。平行制造是基于社会物理信息系统(cyber-physicalsocial systems,CPSS)[6,7,8],以人工社会、计算实验、平行执行为主的ACP方法[9,10,11,12,13],解决实际设计制造过程中结果不可准确预测、难以拆分还原、无法重复实验等问题,并用知识自动化与工业智联网等手段增强智能数据、改善工业结构[14,15,16,17,18,19,20,21]。在传统的机械制造行业中,产品的设计制造是一个线性的流程,如图1所示。而在平行制造(如图2所示)中,基于知识自动化技术,设计制造任务可以依照客户要求进行快速响应并调整,通过任务分解与重组,依靠小微创新来改进、创造新产品,提高产品设计方案的产出与迭代效率;同时,客户也不必一味遵循现有工业标准选择产品,可以通过物联网及互联网表达个性需求,全面参加创造和设计流程。
在平行制造中,除了通过信息化与网络化给予机械设计制造效率与自由度的提升之外,对智能的应用和制造也是很重要的一环。平行制造所描述的智能分为3个方面:描述智能、预测智能、引导智能。这一“智能”的涵盖意义是很宽泛的。目前,应用在机械设计行业的人工智能主要在两个方面:一是计算机辅助设计,例如Autodesk公司的DreamCatcher 所使用的创造式设计(generative design)[22],能够根据给定参数通过一种特别的“史莱姆+骨架算法”生成上百万种机器人骨架结构设计方案并进行性能分析,这一流程被应用在与NASA所属的喷气推进实验室(JPL)合作开发的星际登陆器中;二是专家系统[23,24,25],专家系统是一种能以领域专家的水平来解决复杂问题的智能程序,能够利用专业知识并模仿领域专家的思维模式,解决需要大量专家水平的知识才能解决的复杂问题,这种系统的主要组成部分是产生式规则体系与逻辑推理模型,可应用于加工误差、磨损计算以及机构选型等多种方面。整体来看,这些应用仍然是遵循传统的机械设计与制造的行业流程,都是在某一个或几个环节进行介入,对设计者与工程师起到辅助作用。相比之下,平行制造强调整个流程的智能化,对人工智能的应用也更为全面。平行制造系统的智能建立在知识自动化的基础之上,即从数据到知识、从知识到行为决策的过程,其本质是将人的行为特征考虑到传统的知识表示、知识工程中。通过知识自动化,可以克服由社会泛在大数据引起的制造系统从研发、设计,再到生产测试的“建模鸿沟”[24],将整个制造系统融合为一个整体,不仅能够做到智能化设计、智能化生产,还能做到智能化研发、智能化管理,将机械制造的自动化提升到更高的水准,在降低经济与时间成本的同时起到催动技术创新的作用。
单就机械制造中的设计流程来看,平行制造范式无疑对于机械设计制造行业的产品创新,尤其是对于设计过程中产生的非标设计方案,都是意义重大的。在国内机械行业几十年的发展过程中,许多零部件的设计标准已经制定,这无疑为生产以及市场的管控带来了便利,却也在某种层面上制约了机械行业的创新发展。由中国科学院自动化所的李诗濛博士[26,27,28,29]发明的“星轮减速器”,在二级刚性少齿差行星轮系中使用了“波浪形”的新型齿廓技术,克服了传统少齿差行星轮系中容易出现的干涉问题,使减速器中的齿轮配比更加灵活多变,传动比选择性更大,并且改善了齿廓的受力,减小磨损与断裂状况的发生几率[30]。这种设计与日本Nabtesco公司的摆线针轮减速器(RV减速器)在某种程度上是相似的,因为在传统的齿轮设计中,绝大多数是采用标准化的渐开线齿廓设计的,然而Nabtesco反其道而行之,采用了德国工程师Braren L K [31]的摆线轮传动结构,经过几十年的研发积累,在技术上形成了突破,如今在世界机器人减速器市场上占有70%以上的比重。我国从30年前已经开始仿制机器人减速器,然而由于国外的技术壁垒以及国内精密制造技术差距较大,研制的产品始终在性能上无法与国外同类产品相比。受制于此,国内的机器人行业在成本上难以降低,在产能上也远远不能满足机器人及自动化产业的发展需要。而平行制造的出现,正是给了像“星轮减速器”这种革命性技术创新产品的一个有利平台,使其可以减少研发成本,缩短产业化所需时间,更早地提高中国在高端科技上的核心竞争力。
本文的内容如下:第1部分阐述了平行制造范式中平行设计作为嵌套平行系统的基本模式;第2部分以星轮减速器为例,阐述了这种设计流程在处理非标设计方案的独特优势;第3部分从技术应用角度上对平行设计体系的发展进行展望;第4部分总结全文。
1 平行制造·平行设计体系的基本模式
1.1 平行设计与平行的嵌套
平行系统概念是由王飞跃研究员在2004年首次提出的[32],是指由某一个自然的现实系统和对应的一个或多个虚拟或理想的人工系统所组成的共同系统。在传统的控制理论中,二者的交互是单方面的,即人工系统被动地用于现实系统的控制方面;而在平行系统中,信息化的发展引入了社会数字化的概念,导致整个现实系统不再总是能被精确或是较为精确地建模,从而也暴露出越来越多的问题。因此,需要更进一步地探索人工系统的潜力,使其从被动应用转变为主动的、动态的应用,且能够与实际的复杂系统产生良好的互动效果,从而在复杂系统的管理与控制中充分发挥作用。
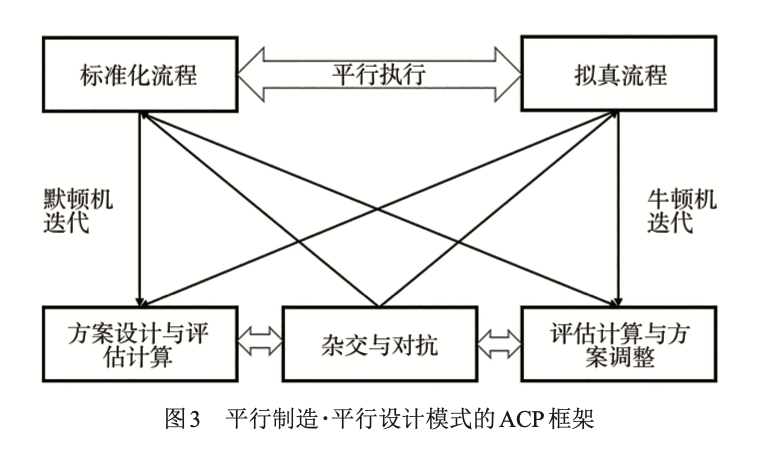
包括平行制造在内的平行系统的应用基础之一是CPSS。CPSS在信息物理融合系统(CPS)的基础上,增加了社会信息系统(social system),通过社会传感器网络实现了社会系统和信息系统的连接[32,33,34,35,36,37,38,39,40]。而单就平行制造体系中的设计流程来讲,CPSS的应用也贯穿于其过程之中,同样地,可以视之为一个平行制造体系下的嵌套平行系统,称之为平行制造·平行设计体系,如图3所示。对于平行制造而言,平行设计与其上层系统(平行制造)共享包括工业生态环境、大数据、工业智联网在内的工业CPSS的所有知识信息和数据信息,具备单独决策的权限,也可独立存在。平行设计作为一个独立的流程,也可以与生产制造流程互为平行。
1.2 平行设计中的社会信息与社会价值建模
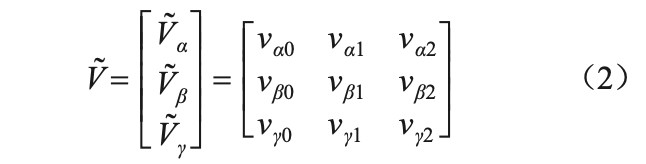
通常来看,产品设计所需考虑的社会信息主要在于供应链方面。一个简单的供应链包括供应商—生产商—消费者市场的三点一线模型,这通常是一个图论问题;而在参数方面,包括客户要求、原料成本、生产力成本、最大生产力、生产时间、目标市场吞吐量等[41]。而就平行制造来讲,这种建模方式是远远不能满足要求的。在空间维度,平行制造中的社会信息建模需要包括产品的上、中、下游产业在社会整体的分布,由此笔者定义一个产品设计的社会价值向量为:

其中vα为上游价值,vβ为中游价值,vγ为下游价值。一般来说,上游价值体现了产品的综合成本高低,中游价值体现了产品在性能、功能上的优劣,下游价值体现了产品的需求市场的大小。根据V在3个维度上的值,可以判定一个产品设计是“上游型设计”“下游型设计”或是“上下游型设计”“中下游型设计”等。进一步地,将时间维度考虑进来,定义产品设计的社会价值趋势矩阵为:
其中v*0代表过去价值,v*1代表现在价值,v*2代表未来价值,且有:
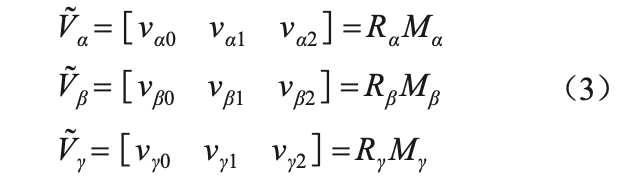
其中Rα、Rβ、Rγ为“设计匹配性向量”,Mα、Mβ、Mγ为“行业竞争力矩阵”。假设产业链的上游有n家供应商,则Rα为1× n的向量,Mα为n ×3矩阵。设计匹配性向量中的元素是衡量“匹配性”的值,在上游是供应商所提供的服务和产品与自身设计的匹配性,在中游是自身设计产品的性能以及功能在同类产品中的匹配性,在下游则是市场对于所设计产品的需求匹配性。相对地,行业竞争力矩阵是无关设计的,是基于包括社会产业信息以及市场、舆论、政策、科学成果等非产业社会信息在内的CPSS,通过知识自动化方法生成的动态变化的矩阵,矩阵内的元素代表着该节点(供应商、生产者或市场)在过去、现在或未来的行业综合竞争力。例如,一个设计在目前时间点的产业中游与一个竞争力高的产品具有较高的匹配性,即在性能和功能上这个设计是完全优于该产品的,那么它的社会价值趋势矩阵中的vβ1就很有可能是一个较高的值;然而如果它的vα0很小,那么就说明它可能在产品设计上采用了较新的工艺,不易参考以往产品的经验;又或者社会上产生的一些迹象显示未来该设计的市场可能萎缩,那么它的vγ2就会相应地下降。由此可见,产品设计的社会价值向量与趋势矩阵,通过对CPSS以及知识自动化的有机结合与应用,可以成为平行制造与平行设计体系内衡量设计成功性的一个有效手段。更进一步地,生产者也完全可以基于产品设计的社会价值向量与趋势矩阵,提前制定智能化的商业运作模式。
目前,我国机械制造行业的各类信息平台处于一个集中程度与社会话题性较低的状态。同时,机械制造行业网络社区信息的分散性、复杂性和不确定性也给我们在获取行业动态信息的实时性和效率上带来很大的挑战,从而使我们在建立有效的社会价值模型时会遇到很大困难。对于这个问题,同样可以通过基于平行系统与社会计算的动态网络群体研究来完成:通过构建虚拟世界群体的各种基本元素库,构造各类人工的网民群体及其社会环境,引入相关规则进行各种组织演化而形成人工组织,利用实验设计理论和各种社会统计方法通过计算模拟进行分析、评估或预测各类策略和事件执行计算实验,最后通过实际动态网民群体与相应的人工组织平行互动、相互反馈、相互利用,进而观察、预测和估计特定事件的产生、演化和影响实现平行执行[42]。
1.3 基于标准化流程与拟真流程的ACP方法
一个基于ACP的平行系统[10]由人工系统(artificial systems)、计算实验(computational experiments)、平行执行(parallel execution)3个构件组成,人工系统建立在人对客观真实系统的认知基础上,与真实系统并行存在,通过利用高效、鲁棒性强的人工智能和机器学习等方法对构建的不同数学问题进行计算实验,在人工系统与真实系统的平行执行过程中,以人工系统为基础指导真实系统,以真实系统为基础优化人工系统,起到双向互动的效果。单就机械设计流程而言,并没有物理系统的实际参与,那么仅仅在机械设计这个框架中实现ACP方法是可行的吗?答案是肯定的。实际上,在通常的机械设计过程中所应用的标准化流程,即机械工程师们根据过往知识与实际经验,针对设计方案中材料和结构的强度、摩擦、刚度、寿命等参数所建立的具有较高可靠性的数学模型,可以视为一个“人工系统”所建立的基础;而缺省的另一半的平行系统,则由计算机仿真环境下的“拟真流程”进行补足。通常的机械设计流程将拟真流程作为标准化流程之后对零件及装配体进行仿真计算,用于验证机构与零件设计合理性的辅助性流程。而在平行制造∙平行设计体系中,将拟真流程也作为一个平行的设计流程引入。其原因有三:一是目前的机械设计标准化流程作为人工系统仅适用于有限的已有设计,缺乏对新设计、独创设计的有效指导及评估手段,极大依赖设计者的想象力与经验;二是以有限元分析方法(finite element method)平台为代表的拟真流程,可以一定程度上弥补标准化流程对独创设计的评估问题,且可以得到较为可靠的结果,但拟真流程对计算力的要求极高,往往需要对特定软件比较熟悉的专业人员对流程进行调试和优化;三是目前标准化流程与拟真流程的自动化程度都比较低,但在未来技术发展与市场要求下有很大的潜力。因此,对于平行制造∙平行设计模式,可以得到一个基于标准化流程与拟真流程的ACP方法的基本框架,如图3所示。在图3中,标准化流程在标准化机械设计流程的基础之上,还需要加入社会信息的建模应用,在第1.2节中提及的社会价值向量与社会价值趋势矩阵可以视为一个较为全面的建模方式。而拟真流程在现有的计算机仿真平台基础之上,还需加入搭载特定算法(如遗传算法)的人工智能脚本,用以对拟真实验进行全自动的调整、监视与管理,并根据拟真实验结果对设计本身进行尝试性迭代。对于标准化流程而言,设计者本身对设计方案进行手动迭代是有必要的,从平行系统的角度来看,可以说是一种“默顿机迭代”。而相对于标准化流程而言,拟真环境更加遵循现实世界物理原则,也可以说这个迭代过程是一种相对的“牛顿机迭代”。在平行执行的过程中,拟真流程与标准化流程会相互通过对偶学习[43]与对抗学习[44,45,46]等方法,进行设计方案与评估方法的杂交与对抗,通过平行学习的方式生成设计大数据[47]。进一步地,也可以应用与平行艺术相似的马尔可夫决策过程[48],通过社会价值趋势矩阵的最优化,将开放性的机械设计流程收敛,生成最适合当前社会需求的创新设计。
2 星轮减速器在平行设计中的应用案例
2.1 星轮减速器的技术特点
星轮减速器(如图4所示)是由李诗濛博士[29,30,31,32]在俄亥俄州立大学郑元芳教授[49]所发明的“Circular Wave Drive”基础上进行改进而发明的,采用了不常用的少齿差行星传动结构,在齿廓上进行了独创设计以消除干涉并改善齿面的受力状况。作为一种机器人减速器,星轮减速器的设计灵活性很好,其尺寸最小可以做到50 mm以内,传动比可以在1~10 000内取值,在动作精密度上,其多齿啮合的特性也可以使其做到接近零回差。
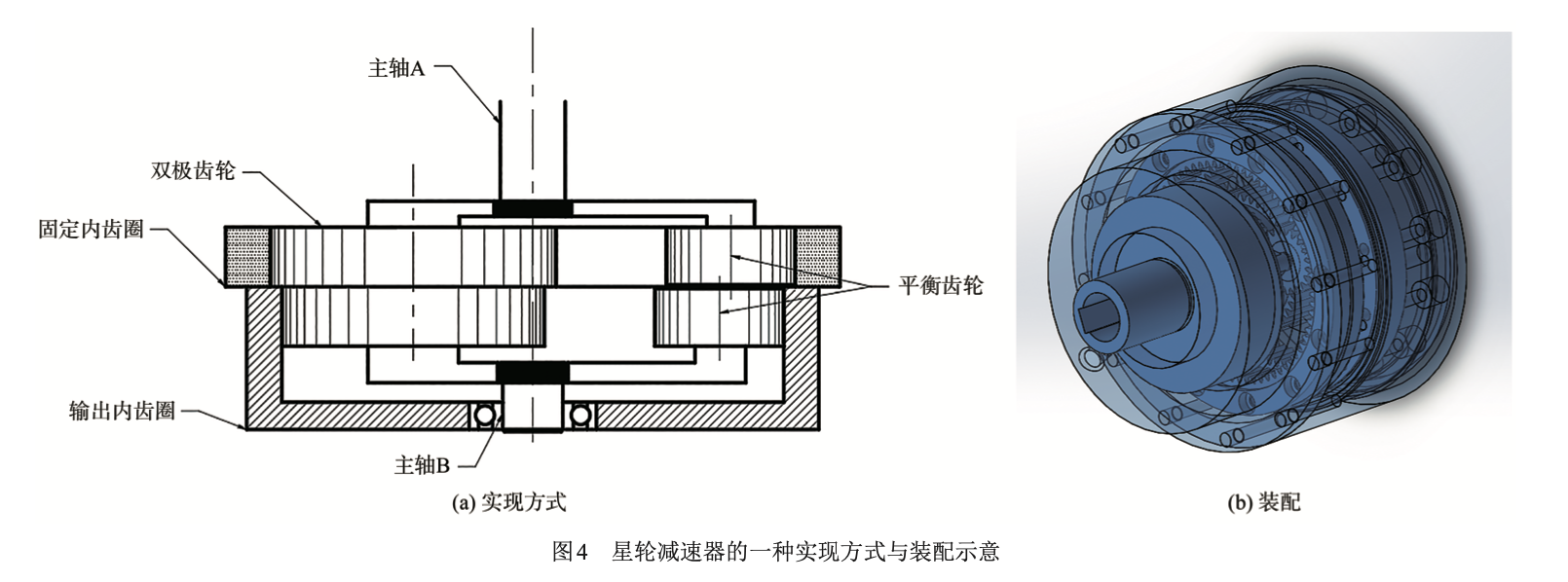
星轮减速器是一种典型的“上下游型设计”。相比RV减速器以及同类别的谐波减速器,星轮减速器本身的构造与一般的行星齿轮系相差不大(没有摆线针轮、针齿以及柔性机构),对材料和加工工艺的要求不如二者,容易控制成本,因此在上游有较明显的优势。在性能方面,星轮的刚性结构使其在寿命和刚度上可以超越谐波减速器,然而在市场占有率方面,谐波减速器的综合竞争力是小于RV减速器的,而目前尚不能确定星轮减速器相对RV减速器一定会产生性能上的优势,只能说有潜力赶超。在下游,因为RV本身的结构设计使其不适合应用在小型机器人关节上,谐波正好相反,而星轮减速器的设计使其能够同时满足大型减速器与小型减速器的需要。进一步地,综合社会中过去与未来预测的信息来看,星轮减速器也是符合社会发展趋势的成功设计,在此略去分析过程。
2.2 星轮减速器的平行设计应用框架
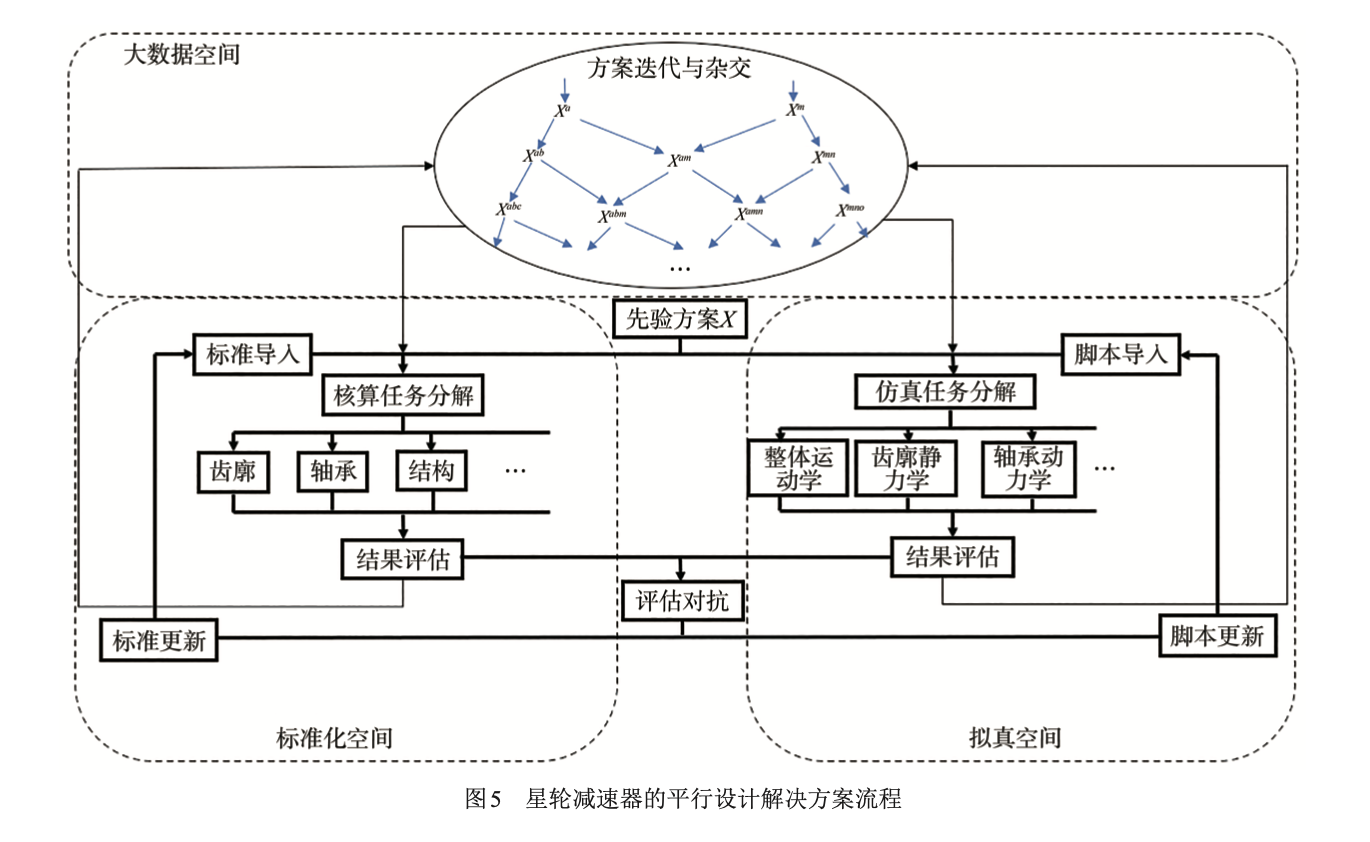
星轮减速器是典型的非标方案。对于非标方案的设计来说,最大的难点在于无法借鉴已有的设计标准与设计思路,为此不仅需要设计人员具有丰富的经验与知识,还需要在此基础之上加以变通[50]。这类问题在平行制造中,可以通过ACP方法加以解决。就星轮减速器而言,其解决方案的基本流程如图5所示。
在图5中,整个设计流程从一个人为生成的先验方案开始。由于星轮减速器的设计方案本身是较为复杂的非标机械装配体,所以考虑到计算量的问题,将核算与仿真的任务进行分解处理。在非标设计的前提下,进行核算所需的标准由已有标准中符合度较高的标准进行先验性导入。分解后的任务按照优先程度,从齿廓、轴承、轴结构等依次进行核算与仿真并评估结果,而有对应关系的评估结果还需要进行一次对抗评估,在评估过程中实现对现阶段标准以及实验脚本的更新。此外,先验方案X将分别就标准化空间以及拟真空间得到的结果进行迭代,生成两种第二代方案(Xa与Xm),而Xa与Xm的折衷方案被称为杂交方案,也就是X am,这些方案重新进入标准化空间及拟真空间进行核算与仿真,产生第三代、第四代方案,依次类推。在整个流程中,迭代、杂交与评估对抗将持续进行,直到收敛。
在这个解决方案中,平行制造∙平行设计体系主要有3个特点:一是实现了机械方案设计的闭环流程;二是实现了已有设计标准与计算机拟真环境的灵活运用;三是通过人机协作实现了设计方案的由小数据向大数据的转化。这些特点可以赋予非标机械方案设计更高的灵活性和可靠性,从而减少在制造过程中的投入成本,推动机械行业的技术创新。
3 平行设计的未来展望
3.1 平行设计软件与云平台
CAD设计软件一直是国际上对我国技术壁垒的一个重要领域。一直以来,主流设计软件价格高昂、更新换代快,而新兴的开源设计软件在性能与功能上又很难与主流设计软件相比。因此,一款智能、集成度高的设计软件可以成为颠覆这一局面的有效方案。与世界发达水平相比,我国在设计软件开发上积累不足,但在计算及通信资源上拥有绝对的优势,这使得基于平行系统理念的平行设计软件成为一个非常有价值的尝试。
平行设计软件的宗旨是实现整个平行设计过程的自动化,而对于平行设计过程的自动化,最为需要的资源第一是大量的社会数据和相关知识,第二就是计算力。因此,平行设计软件必然是基于“平行设计云平台”的。
以星轮减速器设计为例,平行设计软件的客户端与主流设计软件类似,且有一定程度的简化,便于用户应用。用户在客户端完成先验方案的设计后,方案将会在“智能项目经理”的辅助下上传平行设计云平台。智能项目经理以社会价值趋势矩阵为判定标准对用户的设计进行引导,这一过程既可由人担任,也可由实现知识自动化之后的人工智能担任。平行设计云平台与大数据专家系统相连,负责标准化流程与拟真流程。在评估对抗阶段,结合用户的选择进行标准及实验设计脚本的更新。方案在云端进行迭代后返还用户(局部大数据),以保护用户的独创性,方便用户对方案进行保存和修改。
3.2 基于平行设计的社会制造
社会制造的实质在于社会计算,其关键问题在于如何主动、及时地将社会需求与社会制造能力有机地结合起来[19]。然而绝大多数情况下,当前的社会需求与已有的制造标准之间不是完全匹配的,此时在进行产品设计时,需要在现有社会需求与社会制造能力之间进行平衡。以机械制造行业为例,一些已有的标准(如螺纹、轴承、定位销等设计标准)以公制或英制整数尺寸为基准。这些标准在当前行业生态下是难以撼动的,尽管它们在一些特定的设计中并不是在力学性能与成本上最优的解。
基于平行设计的社会制造所要实现的目标则恰恰相反,它以设计为中心,追求最佳的产品性能、成本或是性价比,只要在制造上能够实现,就完全可以抛弃一些标准从而实现部分或者完全的定制化。提出这种制造模式的基础在于近年来区别于传统制造工艺的加式制造工艺[51-53],包括快速成型和3D打印等技术的成熟化与普及化。尽管目前在一些材料性能上尚无法达到传统制造工艺的水准,但这无疑给了我们一个可预见的,更加个性化和离散化的机械制造生态。在不远的将来,平行设计可以很好地将社会需求与社会制造融合起来,成为平行制造与工业5.0的组成基础。
4 结束语
本文着眼于机械行业,在平行制造体系之内发展了作为其嵌套系统的平行设计流程。基于平行制造体系,定义了能够有效活用知识自动化以及CPSS的机械产品设计的社会价值向量与社会价值趋势矩阵,并基于标准化流程与拟真流程建立了平行设计的ACP方法。在这之后通过“星轮减速器”的例子,阐述了平行设计的特点以及解决非标机械方案的优势。最后,本文对平行制造∙平行设计体系的前景进行了展望。
参考文献
[1] JIAO P C , ALAVI A H . Artificial intelligence-enabled smart mechanical metamaterials: advent and future trends[J]. International Materials Reviews, 2021,66(6): 365-393.
[2] NASIRI S , KHOSRAVANI M R , WEINBERG K . Fracture mechanics and mechanical fault detection by artificial intelligence methods: a review[J]. Engineering Failure Analysis, 2017,81: 270-293.
[3] ZHANG Y . Research on key technologies of remote design of mechanical products based on artificial intelligence[J]. Journal of Visual Communication and Image Representation, 2019,60: 250-257.
[4] POTERALSKI A , SZCZEPANIK M . The application of artificial intelligence in the optimal design of mechanical systems[J]. IOP Conference Series: Materials Science and Engineering, 2016,161:012040.
[5] 王飞跃, 高彦臣, 商秀芹 ,等. 平行制造与工业5.0:从虚拟制造到智能制造[J]. 科技导报, 2018,36(21): 10-22.
WANG F Y , GAO Y C , SHANG X Q ,et al. Parallel manufacturing and industry 5.0: from virtual manufacturing to intelligent manufacturing[J]. Science & Technology Review, 2018,36(21): 10-22.
[6] 邓建玲, 王飞跃, 陈耀斌 ,等. 从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架[J]. 自动化学报, 2015,41(12): 2003-2016.
DENG J L , WANG F Y , CHEN Y B ,et al. From industries 4.0 to energy 5.0: concept and framework of intelligent energy systems[J]. Acta Automatica Sinica, 2015,41(12): 2003-2016.
[7] 余涛, 程乐峰, 张孝顺 . 基于信息-物理-社会系统融合和群体机器学习的弱中心化微元网:理论研究与关键科学问题分析[J]. 中国科学:技术科学, 2019,49(12): 1541-1569.
YU T , CHENG L F , ZHANG X S . The weakly-centralized Web-of Cells based on cyber-physical-social systems integration and group machine learning: theoretical investigations and key scientific issues analysis[J]. Scientia Sinica (Technologica), 2019,49(12): 1541-1569.
[8] 张俊, 许沛东, 王飞跃 . 平行系统和数字孪生的一种数据驱动形式表示及计算框架[J]. 自动化学报, 2020,46(7): 1346-1356.
ZHANG J , XU P D , WANG F Y . Parallel systems and digital twins: a data-driven mathematical representation and computational framework[J]. Acta Automatica Sinica, 2020,46(7): 1346-1356.
[9] 王飞跃 . 人工社会、计算实验、平行系统——关于复杂社会经济系统计算研究的讨论[J]. 复杂系统与复杂性科学, 2004,1(4): 25-35.
WANG F Y . Artificial societies, computational experiments, and parallel systems: a discussion on computational theory of complex socialeconomic systems[J]. Complex Systems and Complexity Science, 2004,1(4): 25-35.
[10] 魏立, 王红, 黄敏 ,等. 平行海上油气田:基于ACP的前期开发方案的设计与评估[J]. 智能科学与技术学报, 2019,1(2): 118-124.
WEI L , WANG H , HUANG M ,et al. Parallel offshore oil/gas field: ACP-based front end engineering design and evaluation[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(2): 118-124.
[11] 侯国莲, 弓林娟, 苏烨 ,等. 基于ACP的平行发电控制系统[J]. 智能科学与技术学报, 2019,1(3): 269-279.
HOU G L , GONG L J , SU Y ,et al. ACP based parallel power generation control system[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(3): 269-279.
[12] 杨林瑶, 陈思远, 王晓 ,等. 数字孪生与平行系统:发展现状、对比及展望[J]. 自动化学报, 2019,45(11): 2001-2031.
YANG L Y , CHEN S Y , WANG X ,et al. Digital twins and parallel systems: state of the art, comparisons and prospect[J]. Acta Automatica Sinica, 2019,45(11): 2001-2031.
[13] WANG F Y . Toward a paradigm shift in social computing: the ACP approach[J]. IEEE Intelligent Systems, 2007,22(5): 65-67.
[14] 王飞跃 . 软件定义的系统与知识自动化:从牛顿到默顿的平行升华[J]. 自动化学报, 2015,41(1): 1-8.
WANG F Y . Software-defined systems and knowledge automation: a parallel paradigm shift from Newton to Merton[J]. Acta Automatica Sinica, 2015,41(1): 1-8.
[15] 康孟珍, 王秀娟, 华净 ,等. 平行农业:迈向智慧农业的智能技术[J]. 智能科学与技术学报, 2019,1(2): 107-117.
KANG M Z , WANG X J , HUA J ,et al. Parallel agriculture: intelligent technology toward smart agriculture[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(2): 107-117.
[16] 吕宜生, 王飞跃, 张宇 ,等. 虚实互动的平行城市:基本框架、方法与应用[J]. 智能科学与技术学报, 2019,1(3): 311-317.
LV Y S , WANG F Y , ZHANG Y ,et al. Parallel cities: framework, methodology, and application[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(3): 311-317.
[17] 王飞跃, 张俊 . 智联网:概念、问题和平台[J]. 自动化学报, 2017,43(12): 2061-2070.
WANG F Y , ZHANG J . Internet of minds: the concept, issues and platforms[J]. Acta Automatica Sinica, 2017,43(12): 2061-2070.
[18] 王飞跃, 张军, 张俊 ,等. 工业智联网:基本概念、关键技术与核心应用[J]. 自动化学报, 2018,44(9): 1606-1617.
WANG F Y , ZHANG J , ZHANG J ,et al. Industrial Internet of minds: concept, technology and application[J]. Acta Automatica Sinica, 2018,44(9): 1606-1617.
[19] 王飞跃 . 从社会计算到社会制造:一场即将来临的产业革命[J]. 中国科学院院刊, 2012,27(6): 658-669.
WANG F . From social computing to social manufacturing: the coming industrial revolution and new frontier in cyber-physical-social space[J]. Bulletin of Chinese Academy of Sciences, 2012,27(6): 658-669.
[20] WANG F Y . Social manufacturing and intelligent enterprises: from cyber-physical systems to cyber-physical-social systems[C]// Proceedings of the 25th International Conference on Industrial, Engineering and Applications of Applied Intelligent Systems.[S.l.:s.n.], 2012.
[21] 王飞跃, 孙奇, 江国进 ,等. 核能5.0:智能时代的核电工业新形态与体系架构[J]. 自动化学报, 2018,44(5): 922-934.
WANG F Y , SUN Q , JIANG G J ,et al. Nuclear energy 5.0: new formation and system architecture of nuclear power industry in the new IT era[J]. Acta Automatica Sinica, 2018,44(5): 922-934.
[22] NOOR A K . AI and the future of the machine design[J]. Mechanical Engineering, 2017,139(10): 38-43.
[23] 师汉民, 陈吉红, 阎兴 ,等. 人工神经网络及其在机械工程领域中的应用[J]. 中国机械工程, 1997(2): 5-10,121.
SHI H M , CHEN J H , YAN X ,et al. Artificial neural network and its application in mechanical engineering[J]. China Mechanical Engineering, 1997(2): 5-10,121.
[24] 桂卫华, 刘晓颖 . 基于人工智能方法的复杂过程故障诊断技术[J]. 控制工程, 2002,9(4): 1-6.
GUI W H , LIU X Y . Fault diagnosis technologies based on artificial intelligence for complex process[J]. Control Engineering of China, 2002,9(4): 1-6.
[25] 魏秀业, 潘宏侠 .齿轮箱故障诊断技术现状及展望[J]. 测试技术学报, 2006,20(4): 368-376.
WEI X Y , PAN H . Review of the gearbox fault diagnosis technology[J]. Journal of Test and Measurement Technology, 2006,20(4): 368-376.
[26] 李诗濛. 星轮减速器及具有该星轮减速器的机电一体化设备:CN108006164B[P]. 2019-03-05.
LI S M . Planetary wheel speed reducer and mechanical and electronic integration equipment provided with planetary wheel speed reducer:CN108006164B[P]. 2019-03-05.
[27] 李诗濛. 一种星轮减速机构、减速装置及机电设备:CN208686897 U[P]. 2019-04-02.
LI S M . Star wheel retarder structure, decelerator and electromechanical device:CN208686897U[P]. 2019-04-02.
[28] 李诗濛 . 减速器及具有该减速器的制动装置[P]. 中国,208831620, 2019.
LI S M . Reducer and brake device with the reducer[P]. CN208831620, 2019.
[29] 李诗濛. 缓冲装置以及具有该缓冲装置的减速器和机电设备:CN209511064U[P]. 2019-10-18.
LI S M . Buffer device, speed reducer with buffer device and electromechanical equipment:CN209511064U[P]. 2019-10-18.
[30] SONG L , LIANG S K , ZHENG Z X ,et al. Analysis of the key structures of RV reducer based on finite element method[J]. IOP Conference Series: Materials Science and Engineering, 2019,544(1): 012005.
[31] BRAREN L K Production of cycloidal curves:US1817405[P]. 1926.
[32] 王飞跃 . 平行系统方法与复杂系统的管理和控制[J]. 控制与决策, 2004,19(5): 485-489,514.
WANG F Y . Parallel system methods for management and control of complex systems[J]. Control and Decision, 2004,19(5): 485-489,514.
[33] WANG F Y , YANG J , WANG X X ,et al. Chat with ChatGPT on industry 5.0:learning and decision-making for intelligent industries [J]. IEEE/CAA Journal of Automatica Sinica, 2023,10(4): 831-834.
[34] 袁烨, 张永, 丁汉 . 工业人工智能的关键技术及其在预测性维护中的应用现状[J]. 自动化学报, 2020,46(10): 2013-2030.
YUAN Y , ZHANG Y , DING H . Research on key technology of industrial artificial intelligence and its application in predictive maintenance[J]. Acta Automatica Sinica, 2020,46(10): 2013-2030.
[35] 柴天佑 . 工业人工智能发展方向[J]. 自动化学报, 2020,46(10): 20052012.
CHAI T Y . Development directions of industrial artificial intelligence[J]. Acta Automatica Sinica, 2020,46(10): 2005-2012.
[36] WANG F Y . The DAO to MetaControl for MetaSystems in metaverses: the system of parallel control systems for knowledge automation and control intelligence in CPSS[J]. IEEE/CAA Journal of Automatica Sinica, 2022,9(11): 1899-1908.
[37] 李浥东, 张俊, 陶耀东 ,等. 平行安全:基于CPSS的生成式对抗安全智能系统[J]. 智能科学与技术学报, 2020,2(2): 194-202.
LI Y D , ZHANG J , TAO Y D ,et al. Parallel security: generative adversarial systems for intelligent security in CPSS[J]. Chinese Journal of Intelligent Science and Technology, 2020,2(2): 194-202.
[38] 王飞跃 . 关于复杂系统的建模、分析、控制和管理[J]. 复杂系统与复杂性科学, 2006,3(2): 26-34.
WANG F . On the modeling, analysis, control and management of complex systems[J]. Complex Systems and Complexity Science, 2006,3(2): 26-34.
[39] WANG F Y . Parallel economics: a new supply–demand philosophy via parallel organizations and parallel management[J]. IEEE Transactions on Computational Social Systems, 2020,7(4): 840-848.
[40] WANG F Y . Parallel control and management for intelligent transportation systems: concepts, architectures, and applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2010,11(3): 630-638.
[41] 孟小丁 . 供应链中数学模型及其算法研究[J]. 物流工程与管理, 2011,33(9): 66-68.
MENG X D . Study of mathematical model and algorithm within the supply chain[J]. Logistics Engineering and Management, 2011,33(9): 66-68.
[42] 王飞跃 . 基于社会计算和平行系统的动态网民群体研究[J]. 上海理工大学学报, 2011,33(1): 8-17.
WANG F Y . Study on cyber-enabled social movement organizations based on social computing and parallel systems[J]. Journal of University of Shanghai for Science and Technology, 2011,33(1): 8-17.
[43] XIA Y C , HE D , QIN T ,et al. Dual learning for machine translation[C]// Advances in Neural Information Processing Systems.[S.l.:s.n.], 2016: 820-828.
[44] LOWD D , MEEK C . Adversarial learning[C]// Proceedings of the eleventh ACM SIGKDD International Conference on Knowledge Discovery In Data Mining. New York: ACM, 2005: 641-647.
[45] GOODFELLOW I J , POUGET-ABADIE J , MIRZA M ,et al. Generative adversarial nets[C]// Proceedings of Advances in Neural Information Processing Systems 27:28th Annual Conference on Neural Information Processing Systems 2014.[S.l.:s.n.], 2014: 2672-2680.
[46] GOODFELLOW I J , SHLENS J , SZEGEDY C . Explaining and harnessing adversarial examples[J]. arXiv preprint, 2014,arXiv:1412.6572.
[47] 李力, 林懿伦, 曹东璞 ,等. 平行学习——机器学习的一个新型理论框架[J]. 自动化学报, 2017,43(1): 1-8.
LI L, LIN Y L, CAO D P, et al. Parallel learning—a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1): 1-8.
[48] 郭超, 鲁越, 林懿伦 ,等. 平行艺术:人机协作的艺术创作[J]. 智能科学与技术学报, 2019,1(4): 335-341.
GUO C , LU Y , LIN Y L ,et al. Parallel art: artistic creation under human-machine collaboration[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(4): 335-341.
[49] ZHENG Y F Circular wave drive:US9494224[P]. 2016-11-15.
[50] 梁子坚, 黄腾辉, 杨银花 ,等. 非标自动化机械设备的创新设计[J]. 南方农机, 2020,51(15): 122-123.
LIANG Z J , HUANG T H , YANG Y H ,et al. Innovative design of nonstandard automation machinery and equipment[J]. South Agricultural Machinery, 2020,51(15): 122-123.
[51] SOUSA J P . Robotic technologies for non-standard design and construction in architecture[J]. Nexus Network Journal, 2017,19(1): 73-83.
[52] BOURELL D L , BEAMAN J J , LEU M C ,et al. A brief history of additive manufacturing and the 2009 roadmap for additive manufacturing: looking back and looking ahead[C]// Proceedings of RapidTech 2009:US-Turkey Workshop on Rapid Technologies.[S.l.:s.n.], 2009.
[53] FINK C W . An overview of additive manufacturing, part I[J]. AMMTIAC Quarterly, 2009,4(2): 7-11.
https://wap.sciencenet.cn/blog-2374-1407518.html
上一篇:[转载]第十一届中国指挥控制大会迎来精彩主题报告会
下一篇:[转载]【喜报】JAS连续七年荣获TOP5%最具国际影响力期刊称号