博文
《智能控制五十年回顾与展望:从智能控制到指挥控制智能》
||
《智能控制五十年回顾与展望:从智能控制到指挥控制智能》
“智能控制”正式的名称从1971年开始,到今天50年了。王飞跃研究员在第九届中国指挥控制大会作《智能控制五十年回顾与展望:从智能控制到指挥控制智能》专题报告,从“不忘初心:人工智能与智能控制之源”“发展壮大:智能控制与计算智能”“不忘教训:Lighthill报告及其意义”“跨越鸿沟:从牛顿到默顿的平行升华”“控制智能:平行控制+平行管理+平行智能”“重启征程:从指挥与控制智能到和平化智能战争” 6方面回顾与展望智能控制到指挥与控制智能的发展。学会根据大会报告录音整理成文字版,现微信刊出,供领域内专家学者阅读参考。
《智能控制五十年回顾与展望:从智能控制到指挥控制智能》
王飞跃
中国科学院自动化研究所研究员、中国指挥与控制学会常务理事、
《指挥与控制学报》和《智能科学与技术学报》主编
01 不忘初心:人工智能与智能控制之源

人工智能是怎么来的?
最近又出了一篇文章,要把人工智能起源归向于哥德尔,我不这么认为。我认为要从希尔伯特要把数学机械化开始。后来是罗素跟他的老师怀德海Whitehead,为了给希尔伯特纲领提供基础,就写了三卷本的《数学原理》(Principia Mathematica),希望把数学世界机械化。为什么用这个名字呢?因为这个名字牛顿用过,牛顿当年用这个名字把一个机械世界数学化了,如能把数学机械化,这样就形成一个闭环,各种智能就会自然涌现,这是他们的愿望。这个时候才到了哥德尔。哥德尔的不完备定理,把他们十年的心血抹掉了,也把希尔伯特的梦想消灭了。然后图灵接着他提出计算机械化,图灵机引用的第一篇文章就是哥德尔文章。哥德尔消灭了一个世界,什么都没提出来,但它发挥了重要的作用。图灵给了方案,就是图灵机。真正认识到他们两个工作伟大的是谁?是冯诺依曼。他在这基础上提出计算机冯诺依曼结构,有了今天的计算机,有了今天的信息产业。
人工智能诞生于哪一年?
英国人:1947年,以图灵的《Intelligent Machinary》手稿完成之年为人工智能诞生之年。
美国人:1956年,以达特茅斯“人工智能研讨会”召开之年为人工智能诞生之年。
人工智能到底从哪一年开始的,英国人美国人一直争到20世纪70年代。现在不打了,英国人真是服了。但是他们实现的只是计算的机械化(数据驱动),最初的设想是推理的机械化,是知识驱动,刚刚开始。
人工智能的本名叫什么?
1973年,卢卡斯教授James Lighthill与人工智能创始人John McCarthy在BBC就人工智能展开辩论,McCarthy称自动机Automata是人工智能的本名,就是一种图灵机。后到20世纪90年代,McCarthy多次说人工智能的本名应该叫Cybernetics,不叫的原因是维纳团队内部分裂严重,大家觉得与Cybernetics离得越远越好。
02 发展壮大:智能控制与计算智能

谁首先提出智能控制一词?
傅京孙。他是从学习控制来的,是学习已经知道的未知的知识。他1970年写了一篇学习控制的总结文章,然后立即发现里面有局限,所以他第二年又写了一篇短文(Technical Notes and Coorespondence),首次正式提出“智能控制”一词,所以“智能控制”就是人工智能与智能控制,正式的名称是从1971年开始,到今天50年了。这篇短文一点都不短,短文的主要的思想是把机器人,把人机混合引到控制系统里面来,要像控制机器一样控制人,要像控制人一样控制机器。这也是下一步智能指挥控制最最需要的,也是管理的智能化最最需要的。
谁首先正式开展并组织智能控制研究?
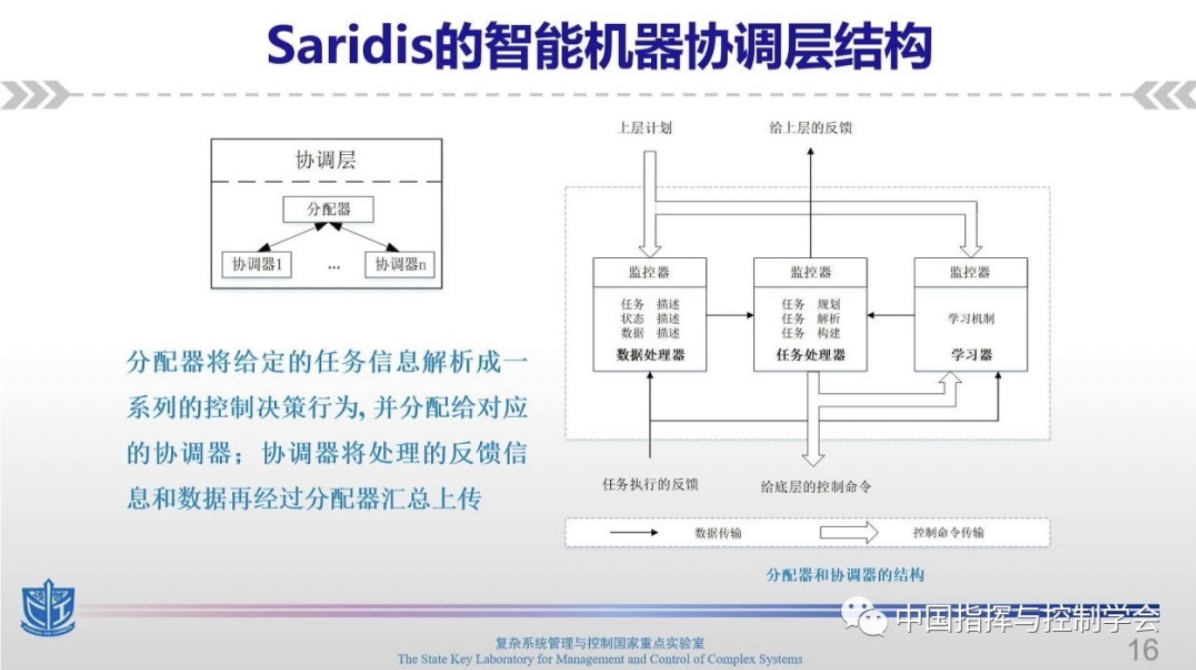
真正做起来是George N. Saridis。他是真正学术上的机器人之父,创办了机器人与自动化学会,然后推动了智能控制。他认为智能机器人控制就是智能控制,所以把傅京孙的两个圈说,智能控制是人工智能与控制的结合,扩展成3个圈,人工智能、OR,再加CS。CS有3个含义,最初的含义就是控制系统,然后是计算机系统和通信系统,画了3个圈,然后开始了这方面的会议,最后有了机器人学会。后来又画了3个框,就是智能控制的3层结构:第1层是公司董事会,CEO;第2层是各种各样的管理员;第3层就是干活的。智能增加,精度递减,或者精度增加,智能递减。

计算智能控制的里程碑
计算智能使得智能控制强大起来,归结起来到这几位。


神经网络发展的两个阶段
第一阶段:初步探索
*1958年计算机科学家Rosenblatte推广了MP模型
*1960年Widrow和Hoff提出了自适应线性元件ADACINE网络模型
*1976年Grossberg提出了自适应共振理论
第二阶段:研究热潮
*1982年J.J.Hopfield提出了Hopfield网络
*1984年Hinton等人提出了Boltzmann机模型
*1986年Rumelhart和McClelland合著《Parallel Distributed Processing: Explorations in the Microstructures of Cognition》,最大作用是推出多层神经网络,为今天的深度学习培育了火种。
03 不忘教训:Lighthill报告及其意义

这份报告把人工智能说成“ABC”“小儿科”,没用,无法跨越“建模鸿沟”,但认为4样东西可能有用,Higgins将这4样东西合起来称为“认知科学”,“认知科学”的提出者及学生如下图所示:

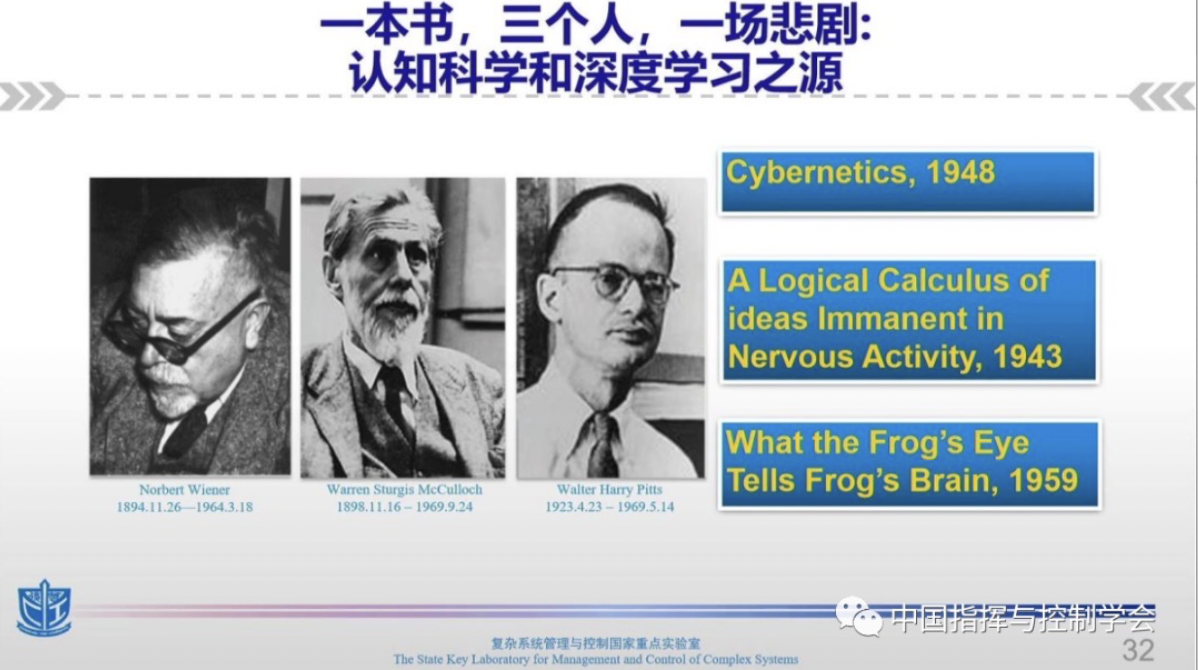
实际上,这3个人在40年开创了计算智能真正的路径。后来3个人突然分裂,“金三角”顿失,产生了悲剧,改变了人工智能发展进程。
04 跨越鸿沟:从牛顿到默顿的平行升华
如何跨越Lighthill的认知鸿沟?

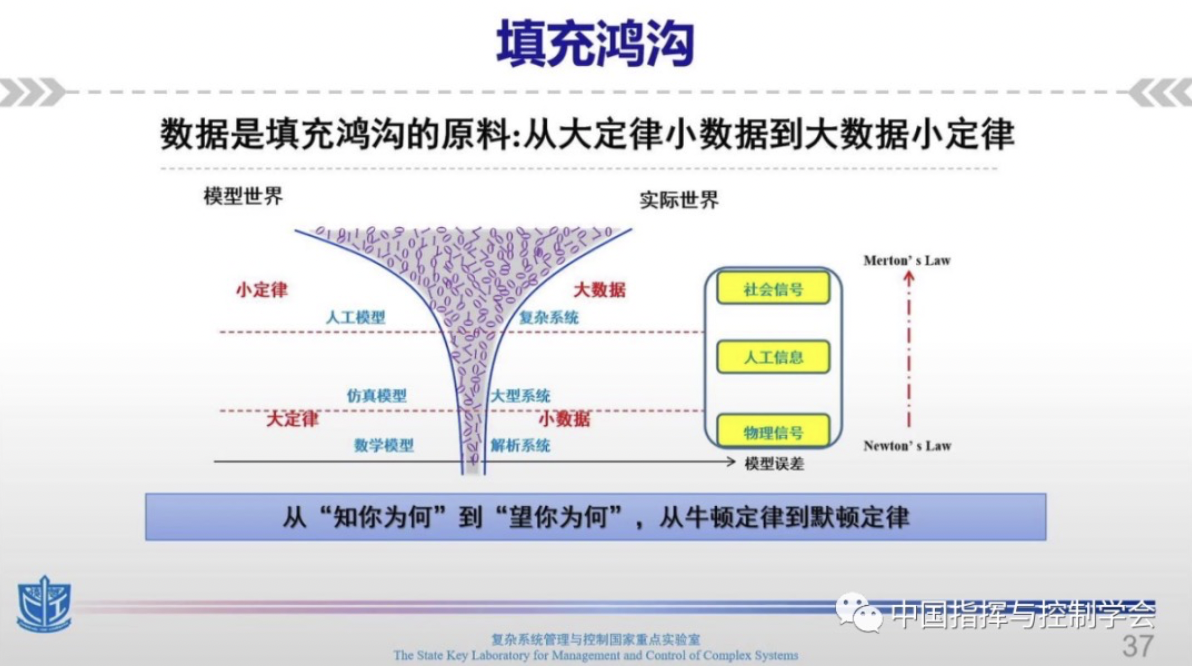

模型世界和实际世界有认知鸿沟和建模鸿沟,我个人认为跨越鸿沟要依靠大数据填充,平行架桥。预测未来的最好方式就是创造未来,系统化起来就是人工社会、计算实验、平行执行,产生3种智能,描述、预测、引导,最后架起实际与虚拟之间的平行之桥在虚拟世界以万变应不变,从小数据生成大数据,把大数据再炼成智数据。Alpha Go就干了这么一件事情。这样,平时以万变应不变,出了事以不变应万变。利用区块链的DAO道和智能合约,把一个不定多样复杂的世界变成敏捷、聚焦、向目标收敛的智能系统。
平行跟并行是不一样的,一个分而治之一个扩而治之。利用仿真过程,实现现实世界的物理实体与虚拟空间的数字副本之间的映射,虚实互动、平行驱动。数字孪生就是最特殊的情况。平行分了3步,第一步就是孪生,叫人工社会,又分3步。有模型的情况是数字孪生,再不行是软件孪生,实在不行是虚拟孪生,反正要孪生。对我们而言,孪生至少4个,描述体、预测体、引导体。当年因为有了虚数,X²+1等于0才可解,相对论和量子力学方程才能写出来。同理,真正要实现智能就必须把智能虚数引进来,这个虚数就是平行,这样才能形成“合一体”世界:人机结合,知行合一,虚实一体,之间有内在的逻辑关系。

05 控制智能:平行控制+平行管理+平行智能
平行控制的原理
原来提的平行控制理论中的几个问题终于在去年几乎全解决,开辟了一个完全新的理论,现在完全以数学的方式描述平行控制。简单而言,就是把控制求导,以前控制是不能求导的。第一是物理定律不允许求导,第二是硬件实现不允许求导,因为求导噪音就扩大了。
平行控制基本结构
现在最基本的平行控制就比经典的控制多了那么一点,这一点就是对控制的导数。现在我们已经在数学上证明了,这个点不是凭空加上的,当人工系统是物理系统的仿射等价之后,就相当于对控制求了一次导。利用平行控制的思想,把线性控制系统完全可以改造,把非线性控制理论也可以完全改造。

现在不但控制要平行,传感也要平行,要把Y=HX左边也求导。从数据采集、图像采集、视觉采集、感知采集、规划、测试、区块链、强化学习到一般学习,全面平行智能化。现在应用到SRM第三代电机,可以把能量节省70%,一般情况至少是20%,实现无感控制,精度高,成本只有三分之一,目前雷达50%、60%用的是Elmo的驱动,可以改变了。电机占所有耗能的60%,所以它在“双碳”里面会起核心的作用。
06 重启征程:从指挥与控制智能到和平化智能战争
我们20世纪90年代就开始做平行交通,现在应用到矿山去。为什么选电机和矿山这两个方面。因为智能制造进厂的第一关就是电机,出了厂的最远端就是矿山,但是最重要的还是国防,是军事。美国人自己花了几乎十年的时间讨论未来的指挥与控制是什么,最后总结出来就是“未来的指挥与控制不再是指挥与控制”,而创了一个“C2 Journal”推行这一理念。后来,美国国防部的指挥与控制杂志因经费问题停刊,我们的《指挥与控制学报》现在成了世界唯一的。
我们如何应对?
我们的应对是不再应对,我们自由畅想“As May We Think”。
我们一定要占领道德哲学高地,我们必须要有自己的体系:
*从哲学上革康德的《永久和评论》的命
*从军事上革克劳塞维茨断言的命,让军事是政治的延续变为政治是军事的延续
*树立智能化战争就是和平化战争的理念
为什么平行?

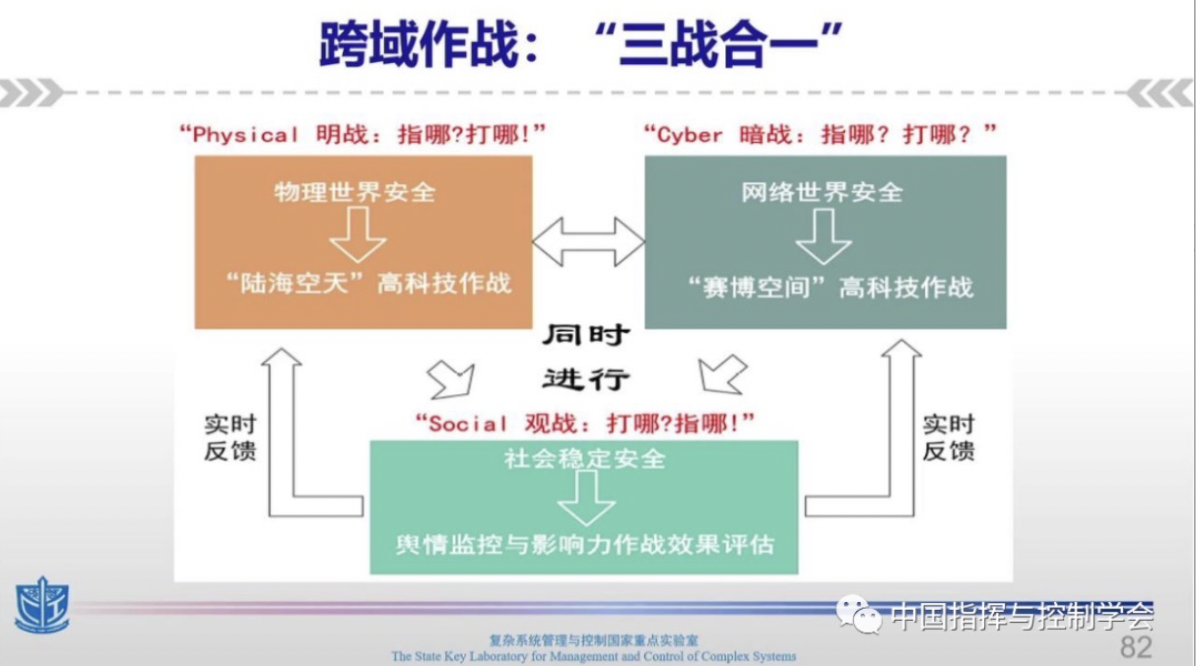
为什么要把UDC化成AFC,这是我心目中未来的军事体系。它的哲学基础是三个世界一起打,这样保证三个世界在CPSS空间300%的安全。人是万物的度量,没有人不可能实现智能化,这就是典型的三战合一。所以指挥与控制要进入5.0,情报也要进入5.0,这个情报本身就含智能,因为情报、智能的英文单词是同一词。
战争的根源
理性的有限性+欲望的无限性+人性中对冲突的自然向往
要想到战争的根源,我们要有技术保障,让理性提高,政治要成为战争的延续。核心的技术就是社会认知战,我们应该重视这项工作。将来实现的不是物理世界100%安全,要3个100%安全,物理世界安全、信息世界安全、知识世界认知安全。

智能战的新常态:战争的和平化


让政治是战争通过其他手段的延续,让和平成为世界的常态,把战争和平化。我们从2004年底一直做这方面的研讨,《局域网络化自主作战的概念与展望》是最早的,一个局部区域全是无人战,无人机、无人车、无人传感、无人网络,全是平行设备。《平行武器:迈向智能战争的武器》是2005年提的报告。我们要做平行武器、平行火箭,要从开源情报到平行情报,坦克也是平行的,导弹也是平行的,航母也是平行的。要保密,要安全,区块链也要平行,要把不对称的战争变成对称的和平。美军是OODA,我们也要创新,我们做PREA。然后把军事指挥与控制变成常规的“商业管理”,把企业里面常规的管理变成军事的指挥与控制。希望把PREA至少变成跟OODA一样耳熟能详。我们有基于模型的系统工程,还要有基于模型的情报,然后把它切实应用到城市战、认知战。
怎么来实现?借用美国人的一句话“科学家是高地,科学家是未来,科学家是长期的回报”。我们现在已经在这条路上了,所以也希望将来我们通过智能战争、指挥与控制智能、战争和平化实现6S世界:在物理世界安全Safety、网络世界安全Security、生态发展与可持续Sustainability、然后顾及各国各种情况的个性化利益Sensitivity、优化的同时要为人类发展提供服务Service、走向智能的世界Smartness,这是中国的机会!
https://wap.sciencenet.cn/blog-2374-1297658.html
上一篇:[转载]《指挥与控制学报》“联合全域指挥与控制” 专刊征文通知
下一篇:[转载]JAS位列自动化学科全球第8!2021谷歌学术出版物影响力榜单发布