博文
[转载]CT引导下肺活检手术机器人研发
||
CT引导下肺活检手术机器人研发
张涵1,张国良3,4,5,冯圣洁1,李庆云3,4,5,瞿介明3,4,5,谢叻1,2
(1. 上海交通大学 材料科学与工程学院 塑性成形技术与装备研究院,上海 200030;2. 上海交通大学 医疗机器人研究院,上海 200030;3. 上海交通大学医学院附属瑞金医院 呼吸与危重症医学科,上海 200025;4. 上海交通大学医学院 呼吸病研究所,上海 200025;5. 上海市呼吸传染病应急防控与诊治重点实验室,上海 200025)
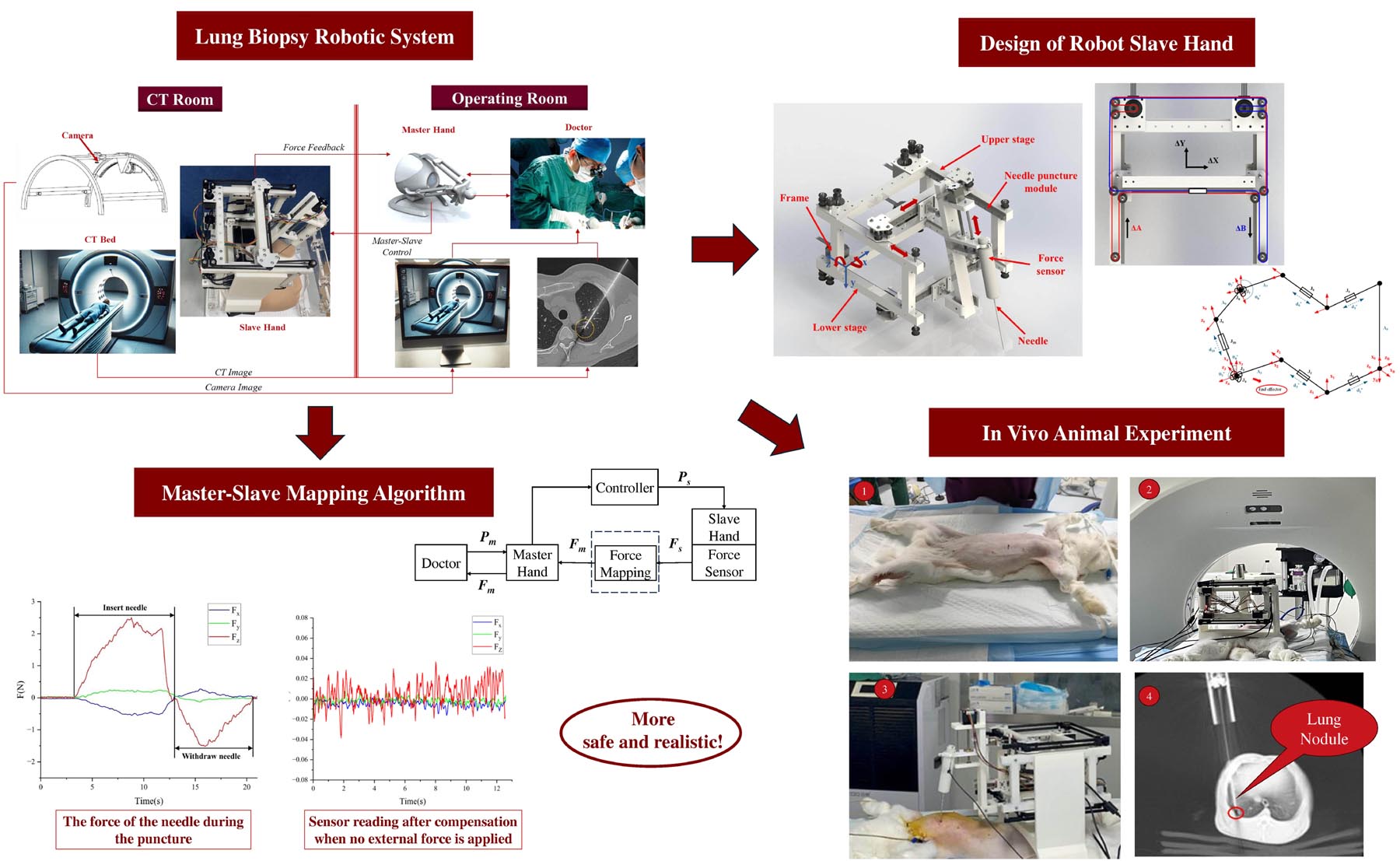
摘要:传统的肺活检手术因缺乏实时影像引导,操作复杂且耗时,要求医生在手术室与CT影像设备之间频繁移动。机器人技术已在医疗手术中得到广泛应用;然而,如何以可靠的精度和安全性满足肺活检手术的要求,仍是一个研究课题。本文介绍了一种用于CT引导下肺活检的手术机器人。文中对该机器人机构进行了运动学分析,并为其开发了一套定制的主从控制系统。为确保手术过程的可靠性与真实感,提出了一种力反馈算法。最后,通过机构定位精度实验、靶点定位精度实验验证了系统的可行性,并开展了活体动物实验,为临床应用奠定了基础。
关键词:机器人辅助手术,主从控制,运动学模型,力反馈
扫二维码浏览全文

Cite this article: Zhang, H., Zhang, G., Feng, S. et al. Development of Surgical Robot for CT-Guided Lung Biopsy. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2846-0
https://wap.sciencenet.cn/blog-45888-1500534.html
上一篇:[转载]基于主被动联合驱动的助力型踝关节外骨骼机器人的协调性设计
下一篇:[转载]SDA-Loc:一种用于点云地图中跨模态定位的语义驱动对齐算法
扫一扫,分享此博文