博文
Agronomy:中国农业大学工学院苏文浩研究员团队突破性成果:智能机械株间除草系统助力高效生菜种植
||
2024年11月28日,中国农业大学工学院苏文浩研究员团队在 Agronomy 期刊发表了一项重要研究成果——基于优化卷积神经网络的生菜杂草自动检测与机器人除草系统 ( Automatic Lettuce Weed Detection and Classification Based on Optimized Convolutional Neural Networks for Robotic Weed Control) 。该研究通过集成优化的深度学习模型与智能机械系统,实现了生菜田间杂草的高效识别与精准清除,为自动化除草提供了创新解决方案。

除草策略示意图
研究背景与意义
生菜作为全球广泛种植的蔬菜,其生长易受杂草影响,导致产量损失高达34%。传统除草依赖人工或化学药剂,存在成本高、污染环境等问题。机械除草虽环保,但需精准识别作物与杂草,尤其株间杂草因贴近生菜而更难清除。近年来,深度学习与计算机视觉技术的结合为农业自动化提供了新思路,但现有模型在复杂田间场景中的精度与实时性仍有提升空间。
研究亮点:改进YOLOv8L模型与智能机械系统
该团队提出了一种新型深度学习模型LettWd-YOLOv8L,首次将全局注意力机制 (GAM) 与坐标注意力机制 (CA) 融合,显著提升了杂草与生菜的识别精度。该模型基于YOLOv8架构优化,通过增强特征提取与多尺度信息融合,实现了对6种常见杂草 (如藜、马齿苋等) 的高效分类。
关键技术突破
模型优化:
GAM模块:增强模型对关键区域的关注,抑制背景噪声。
CA模块:结合通道与空间注意力,提升小目标检测能力。
数据增强:通过旋转、翻转、噪声注入等技术,将原始584张图像扩展至3008张,提升模型鲁棒性。
生菜定位算法:传统方法依赖边界框中心点,易受杂草干扰。
研究团队提出基于HSV颜色空间与灰度掩膜的定位算法,通过加权计算生菜真实中心点,定位精度提升至89.273% (光照良好条件下)。系统由STM32控制器、气动伺服装置及工业摄像头组成。除草刀片通过气动控制实现开合,工作时以3.28 km/h速度行进,精准避开生菜安全区 (12.4 cm宽),株间除草率达83.729%。
模型性能:YOLOv8L在精度 (99.732%)、召回率 (99.907%)、mAP@0.5 (99.5%) 等指标上优于YOLOv8与YOLOv10系列模型。光照良好时,低杂草密度 (<10株/m²) 的除草率达88.661%。
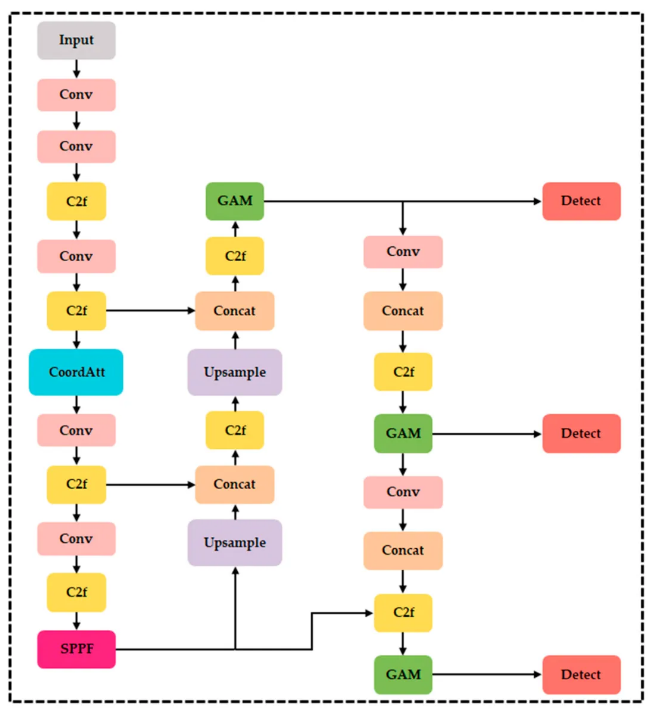
LettWd-YOLOv8L模型架构
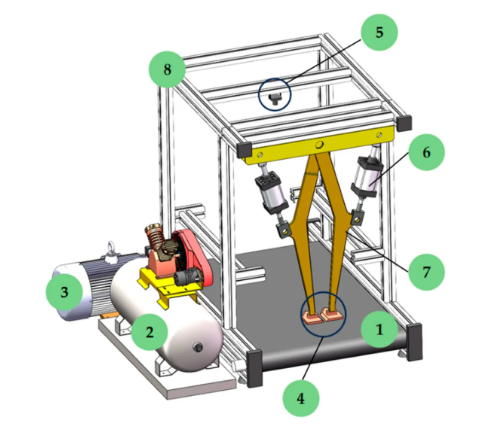
智能生菜株间除草系统
研究意义与未来展望
该成果为农业机器人提供了“视觉识别+精准执行”的一体化解决方案,显著降低人工成本与化学污染风险。然而,当前实验基于传送带模拟田间环境,未来需进一步开展真实田间试验,验证系统在复杂地形与多变光照下的稳定性。此外,研究团队计划优化除草刀片设计以减少杂草缠绕,并探索激光除草等技术的集成应用。
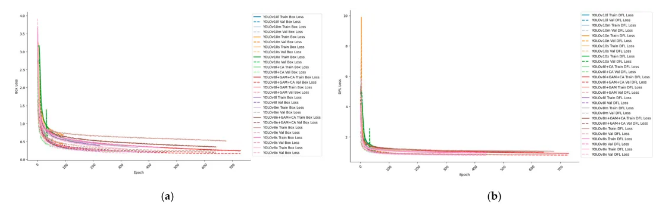
不同模型损失曲线图
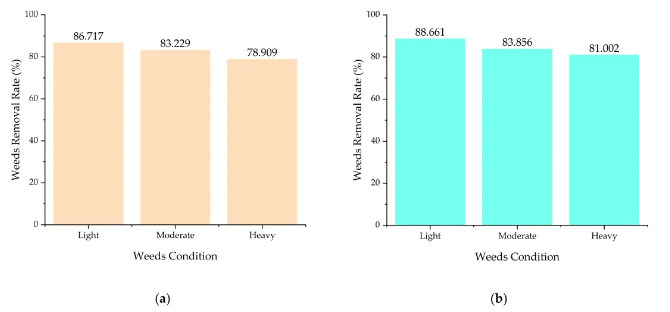
不同杂草密度下除草系统的验证结果:(a) 光照条件差;(b) 光照条件良好。
总结
中国农业大学工学院苏文浩研究员团队通过深度学习与机械控制的协同创新,推动了智能农业装备的实用化进程。这项研究不仅为生菜种植提供了高效除草方案,也为其他作物的精准管理提供了技术范本,标志着我国智慧农业技术迈向新高度。
阅读英文原文:https://www.mdpi.com/3064142
期刊主页:https://www.mdpi.com/journal/agronomy
Agronomy 期刊介绍
主编:Prof. Dr. Leslie A. Weston, Charles Sturt University, Australia
文章类型包括农学及农业生态学领域的研究型文章及综述,目前已被Science Citation Index Expanded (SCIE) 和Scopus等多个数据库收录。
2023 Impact Factor:3.3
2023 CiteScore:6.2
Time to First Decision:17.6 Days
Acceptance to Publication:2.4 Days


https://wap.sciencenet.cn/blog-3516770-1487900.html
上一篇:对话 2024 年度 Catalysts 期刊杰出审稿人奖得主管大秦博士
下一篇:Network:云安全框架、问题和建议解决方案的分析