博文
平行装卸:迈向智慧物流的智能技术
||
平行装卸:迈向智慧物流的智能技术
沈大勇,王晓,刘胜
【摘 要】基于 ACP 的平行理论在复杂、不确定系统建模与控制方面发挥了重要作用,平行装卸是平行理论在物流装卸领域的具体应用。提出平行装卸系统的基本框架,通过构建不断更新的人工装卸系统模型来描述实际装卸过程,在此基础上,人工装卸系统通过计算实验对实际装卸过程进行预测并给出最佳解决方案,实际装卸系统根据最佳方案的诱导结果再输入人工装卸系统,两者虚实互动,平行执行,实现平行系统的不断升级和优化。
【关键词】ACP;平行理论;平行装卸;计算实验;智慧物流
【引用格式】沈大勇,王晓,刘胜,平行装卸:迈向智慧物流的智能技术,智能科学与技术学报,2019,1(1): 34-39.
Parallel loading and unloading: smart technology
toward intelligent logistics
SHEN Dayong, WANG Xiao, LIU Sheng
Abstract: The ACP theory plays an important role in modeling and controlling complex, uncertain systems. Parallel loading and unloading is the integration of this theory in intelligent logistics. The basic framework of the parallel loading and unloading system was proposed in this paper. In this framework, the artificial system was built and updated continuously to describe real loading and unloading process, then computing experiments perform all kinds experiments for predicting all possible development and evaluate the best scheme. Finally, a bridge between the real system and the artificial system was built by the parallel execution and a long-term guidance for the real system could be realized, while artificial system was updated based on information from the real system.
Key words: ACP, parallel theory, parallel loading and unloading, computing experiments, intelligent logistics
Reference:SHEN Dayong, WANG Xiao, LIU Sheng, Parallel loading and unloading: smart technology toward intelligent logistics, Chinese Journal of Intelligent Science and Technology, 2019,1(1): 34-39.
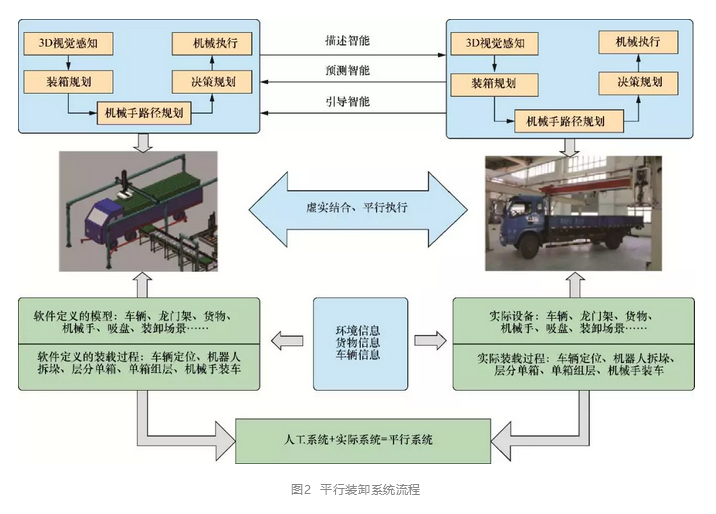
1.引言 智慧物流是指利用集成智能化技术,使物流系统能模仿人的智能,具有思维、感知、学习、推理判断和自行解决物流中某些问题的能力。在流通过程中通过获取、分析信息做出决策,从源头开始对商品实施跟踪与管理,可通过射频识别(RFID)技术、 传感器、 移动通信技术等实现配送货物自动化、信息化和网络化。国家高度重视智慧物流的发展,如 2014 年国务院出台《物流业发展中长期规划》、2016 年国家发展改革委印发《“互联网+”高效物流实施意见》等,明确提出要加快智慧物流技术的发展与应用。 装卸作为物流的重要一环,对于物流流通的快慢具有重要的影响,因此,研究装卸技术的发展与应用是智慧物流发展的重要方向。随着电子商务和贸易的全球化发展,全球的物流业务量每年都以很高的速度增长,需要大量的物流从业人员完成货物的分拣、包装、装卸和运输等一系列物流过程。目前大部分装卸工作都是人工完成的,这无论对于工人劳动强度,还是企业用人成本来说都是一个痛点。另外,人工装卸作业存在大量的问题:随着人口红利逐渐消失,人工成本不断上升;野蛮装卸会造成货物新的质量缺陷,影响服务口碑;受农忙、春节等影响,人员产生波动,淡旺季难平衡,存在安全隐患,工伤事故时有发生。 平行装卸正是在上述发展环境下提出的,是以基于 ACP 的平行理论为支撑的一种装卸技术新范式。平行装卸面向实际装卸过程中的复杂性、不确定性,通过平行理论和智能装卸技术,构建可平行执行、协同优化的装卸体系。 2.相关工作综述 在学术界,2008年Echelmeyer[1]就对物流作业过程自动化面临的挑战进行了概述,他提到了货物的装卸自动化和解垛、码垛的自动化需求与难点,为下一步物流自动化的发展指出了可能的发展方向。欧洲有个专门研究装卸自动化的RobLog项目[2],该项目支持研发了两款针对不同应用场景的机器人,Empticon II Robot 机器人针对卸载袋装的咖啡豆而研发,Parcel Robot 针对能够卸载多元异构的商品而研发。RobLog项目利用扫描相机采集深度和图像RGBD数据,利用RGB的图像特征抽取texture-based和shape-based特征进行融合,利用线下训练的物体模型的先验知识数据库进行物体的识别和姿态的估计。 Rasoul在文献[3]中分析了如何选择3D传感器,并对物体姿态的估计提出了改进方法。通过对物体之间的空间关系和重力支撑关系进行分析,获取物体的最佳抓取点。Rasoul也进一步考虑了物体漏检或者物体空间姿态不确定条件下抓取点的判断问题。 在工业界,早在2003年,DHL物流公司和其合作伙伴就发明了一款可伸缩的装卸机器人Parcel Robot[4],该机器人由一个底架、激光扫描器、传送带和吸盘系统组成,机器臂的抓取部分采用真空吸盘。但是,限于当时的技术发展水平,Parcel Robot 不够成熟也很难实用。 TEUN是由ErgoLogB.V公司研发的一款全自动的集装箱装卸系统,该系统由一个负载为125 kg的六轴的机器人、一个真空吸盘抓手和一个视觉检测系统组成,TEUN能够处理的箱子尺寸在100 mm× 100 mm到600 mm×100 mm之间。 Universal Robotics公司研制了一款叫Random Box Mover的机器人用来抓取不同规格随机摆放的产品。视觉识别部分利用微软的Kinect结构光扫描和低成本的双目摄像头进行立体视觉的识别。每小时能够装卸720个箱子,识别箱子的范围能够达到152 mm×152 mm×3 mm至边长为1219 mm的立方体大小。识别精度能够达到±0.5 mm~±5 mm。 Wynright是美国的一家工业机器人公司,研发了一款类似于DHL Parcel Robot的装卸机器人,每小时能够装卸500个小箱子,不像DHL机器人采用激光扫描器,Wynright采用了低成本的摄像机。 机器人同样也用在拣选方面,拣选机器人可以分为固定拣选机器人(stationary piece picking robots)和移动拣选机器人(mobile piece picking robots)。目前固定拣选机器人有Robo-Pick机器人和Knapp机器人;移动拣选机器人有IAM Robotics、Fetch Robotics、Magazino和Agrobot。 德国的SSI Schaefer公司生产了一个叫Robo-Pick的机器人,旨在解决商品的拣选问题,其每小时能拣选2400个商品。Knapp系统能够根据不同商品切换真空抓取机械手,Viastore不仅能够抓取一个商品而且能够将商品放进周转箱里。 美国的IAM Robotics公司是一家移动拣选的机器公司,它在移动的机器人底座上加上一个机械臂和摄像头,可以在传统的仓储系统里面进行导航并从货架上拣选商品放在周转箱中。Fetch Robotics是另一家获得软银公司(SoftBank)2300 万美元投资的物流机器人公司,专注于移动拣选机器人的开发,能够从一个货架上自动抓取货物放在包装箱里。Magazino是一家德国的创业公司,专注于研发基于感知驱动的移动内部物流机器人,最新的产品是利用2D和3D摄像机识别和抓取物体并放在准确的位置上。西班牙公司Agrobot研发了一款用于采摘草莓的机器人,它利用摄像头识别成熟的草莓并摘取,留下不成熟的草莓。 Amazon在2013年花费了7.75亿美元收购了KIVA机器人,KIVA机器人是一家致力于研发仓储物流机器人的创业公司。Amazon宣称在他的13个物流中心里有3万个KIVA机器人在工作。但是,KIVA机器人解决的是货到人(goods-to-picker)的运输问题,之后仍需要人工进行拣选或者上架。因此,为了解决无人拣选和上架的问题,从2015年起Amazon每年举行Amazon Picking Challenge(APC),其目的是在全世界范围内解决机器人到货(robot-to-goods)的问题,让机器人通过机器视觉识别拣选颜色、形状各异的货物。2017年,APC变更为Amazon Robotics Challenge(ARC),比赛一共分为三轮,第一轮为拣选任务(pick task),从仓储系统中将目标对象移动到指定的箱子里;第二轮为上架任务(stow task),将目标对象从箱子里取出并摆上仓库的货架;最后一轮为组合任务(final task),完成前两轮比赛的组合任务,先完成stow task再进行pick task。 Google每年也花费巨资在机器人研究上,并收购了由OpenCV创始人Gary Bradski建立的Industrial Perception, Inc.(IPI)公司,它是一家面向物流自动化机器视觉感知的公司,并和Yaskawa Motoman Robotics机器人厂商合作研发物流分拣和装卸机器人。 综上所述,装卸技术向软件密集型转变,如何在充满复杂性、不确定性的环境中提高装卸系统的感知能力,实现快速、稳定的装卸是智能装卸技术面临的挑战。 3.平行装卸研究框架 面临多重复杂性、不确定性因素,中国科学院院自动化研究所的王飞跃研究员提出了ACP理论,采用计算实验的方法解决这类复杂系统中的问题。ACP(人工系统(artificial systems)、计算实验(computational experiments)、平行执行(parallel execution))方法的核心思想包括应用基于Agent 智能体等数据驱动算法构建的人工系统来描述复杂系统,解决复杂系统本质上不能解析建模的问题;以计算机为实验室通过对人工系统的计算实验来解决真实系统的预测解析;最后,通过对实际系统与人工系统构成的平行系统进行平行执行来实现系统的管控与引导智能。近年来,ACP 方法已经成功地应用于交通、化工、经济、社会安全等众多领域,为面向以人为核心的复杂社会问题的研究提供了完整的解决方案[5-25]。 平行装卸系统是ACP理论在物流装卸领域的推广应用,其中“A”“C”“P”分别表示平行装卸系统中的描述智能、预测智能和引导智能。平行装卸系统主要由人工装卸系统和实际装卸系统组成,如图1所示。在此框架下,平行装卸系统的主要内容如下。 § 学习与培训:通过学习与培训,人工系统构建实际系统中的模型,使之逼近实际系统,建立对实际装卸系统的全面、真实、准确的描述,形成“描述智能”。 § 实验与评估:人工系统通过计算实验对实际装卸过程进行分析预测,并给出最佳装卸方案,实现“预测智能”。 § 预测与引导:人工装卸系统计算实验生成的解决方案诱导实际装卸系统,实际装卸系统将诱导结果再输入人工装卸系统,两者虚实互动,平行执行,反馈调节,形成循环滚动的过程,实现“引导智能”。 平行装卸系统流程如图2所示。 3.1 平行装卸之描述智能 描述智能通过解决如何在虚拟空间(cyber space)构建人工系统来描述实际系统。根据实际的装卸过程,人工系统中需要构建的模型主要包括以下几个。 (1)机械执行过程 车辆模型作为装卸的载体包括车辆类型(高栏车、半挂车、平板车、栏板车、厢式车等)、车厢长度、车厢宽度和车厢高度;货物模型包括货物名称、货物类型、货物尺寸、货物标准重量;机器人模型包括拆垛机器人、龙门桁架机器人、吸盘;输送设备模型包括输送机、拆垛工位、拆层分单列工位、单箱组层工位以及破损工位、压力传感器。 (2)视觉感知过程 根据实际需求采用不同的相机模型,如深度相机、RGB相机、激光相机等;环境因素模型包括天气、光源、太阳照射角度。 (3)智能控制过程 智能控制过程用到的算法由视觉感知算法、动态装箱规划算法、路径规划算法、机械执行算法。 (4)人机交互过程 人机交互模型包括安全监控预警模型、上位机控制模型、用户终端模型和云服务器模型;数据解析模型包括车辆数据解析、货物数据解析、点云数据解析、场景解析;数据存储模型包括存储货物信息、作业报表信息、车辆信息、故障和安全报警信息。人机交互模型三维效果、视频、图片或语音的方式显示人工装卸场景的运行状态、装卸进度。 构建人工装卸系统所需的相关模型包括但不限于上述模型,在这些模型的共同驱动下,装卸过程具有一定的透明性,弥补了实际装卸过程对部分过程不可知、难描述的情况。 3.2 平行装卸之预测智能 预测智能是建立在描述智能基础之上的对未来发展的预估和优化,基于计算实验实现,反映的是基于当前和过去的规律对未来的认识。计算实验可以弥补在实际装卸过程中无法实现或不能实现的相关场景,适用于实际装卸过程中的决策分析并提供决策支持。实际装卸过程没有足够的条件允许装卸过程多次重复,人工系统可以对实际装卸过程出现的情况及未出现的情况进行推演计算。 平行装卸系统要解决的是如何对装卸环境、装卸方案进行更好的管理和控制。以实际装卸过程为例,目前的装卸系统主要依靠人的经验根据装载量大致确定货物在车辆上的装载情况、选用的车长以及装载过程中货物堆放的垛型等。装载数量、货物尺寸以及车辆装载空间等不确定性因素的变化均会造成装载效果不好、装载空间利用率不高等情况。因此,装卸过程一定要具有动态性、可控性、可预知性。在平行装卸人工系统中,如何装载、装载效果如何是装卸过程机械执行、视觉感知、智能控制以及人机交互模块计算实验的综合结果。基于ACP的计算实验方法,人工装卸系统通过对装载模型、视觉感知算法、动态装箱规划算法、路径规划算法、机械执行算法等进行计算,并对人工装卸过程中产生的数据进行解析,建立人工装卸过程。通过分析人工装卸过程的实验结果,对实际装卸过程中可能出现的情况进行分析预测,指导实际装卸过程。 3.3 平行装卸之引导智能 在描述智能的模型和预测智能的计算实验基础上,平行装卸系统在人工系统和实际系统之间进行平行执行过程,两者相互作用、相互反馈、相互引导,不仅利用“当前和过去的数据”,而且能综合考虑期望结果、所处环境等更多影响因素,在不断解析所有可能方案的基础上,提出“可以直接用于决策的建议或方案”,实现两个系统的滚动优化过程,实现智能引导。 在平行装卸系统中,引导智能的过程主要包含两方面:1)人工系统预测的装卸方案、优化算法对实际装卸过程进行指导;2)实际装卸系统中产生的新情况对人工系统计算实验过程进行修改和优化。具体来说,人工装卸系统为实际装卸系统提供多样、复杂的装卸方案和优化算法,指导实际装卸过程;而在两个系统持续不断的交互中,人工装卸系统也会不断吸收实际装卸过程中产生的新数据,并不断完备自身的模型、算法,产生可直接用于实际装卸过程的建议或方案。 4.结束语 本文将基于ACP的平行理论应用到智慧物流装卸技术中,提出平行装卸系统框架,该系统包含人工装卸系统中人工系统的构建、计算实验和平行执行。通过构建人工系统模型,建立对真实装卸系统的全面、真实的描述,使人工系统逼近真实系统,实现“描述智能”;人工系统通过计算实验对实际装卸过程进行分析预测,并给出最佳装卸方案,实现“预测智能”;人工装卸系统计算实验生成的解决方案诱导实际装卸系统,实际装卸系统将诱导结果再输入人工装卸系统,两者虚实互动,平行执行,反馈调节,形成循环滚动的过程,实现“引导智能”,最终实现复杂、不确定环境下的智能装载过程。 目前,本文作者团队利用平行理论技术、计算机视觉、机器自动化等技术开发平行装卸系统,通过对装卸车辆、货物、作业环境等的智能识别,以及智能装箱算法,计算装卸坐标与搬运路径,引导机器人完成自动装卸过程,实现全自动无人化装卸,目前系统已经完成第一阶段的整体测试,后续会进行系统算法、整体性能的提升和完善。平行装卸系统的应用将大幅度提高装卸的精度和效率,并可广泛应用于家电、快消品、电商、日化、食品、医药等领域。 平行装卸系统框架的构建完成,包含了大量的信息以及计算方法,计算机视觉、人工智能、机器自动化等相关技术的发展有助于更加精确和完善的人工系统的构建,获得更加可靠、有效的装卸方案。因此,基于ACP的平行理论在智慧物流装卸领域的应用具有重要的、前瞻性的实际意义,是推动智能装卸的有效途径,具有巨大的研究价值和应用前景。




https://wap.sciencenet.cn/blog-951291-1188016.html
上一篇:结合深度学习与生物特征识别在冷链拣选中的算法研究
下一篇:智车科技第27周自动驾驶周刊丨华为拟获甲级测绘资质;Waymo无人车获准在加州运送乘客;Model3获EuroNCAP五