博文
基于UWB定位技术的多移动机器人编队控制
||
基于UWB定位技术的多移动机器人编队控制
郑亚君,薛磊,董璐,王庆领
【摘 要】提出了一种基于超宽带(UWB)定位系统的多移动机器人编队控制算法及系统。UWB定位技术是一种较为成熟的技术,但目前较少应用于编队控制问题中。首先给出了系统框架设计以及机器人的硬件设计,然后对该系统建立数学模型,根据建立的系统模型,设计出分布式控制算法,并且给出系统稳定性的证明,最后仿真实验验证了算法的有效性。
【关键词】移动机器人;UWB定位;编队控制
【引用格式】郑亚君,薛磊,董璐,王庆领 . 基于UWB定位技术的多移动机器人编队控制,智能科学与技术学报,2019,1(1): 83-87.
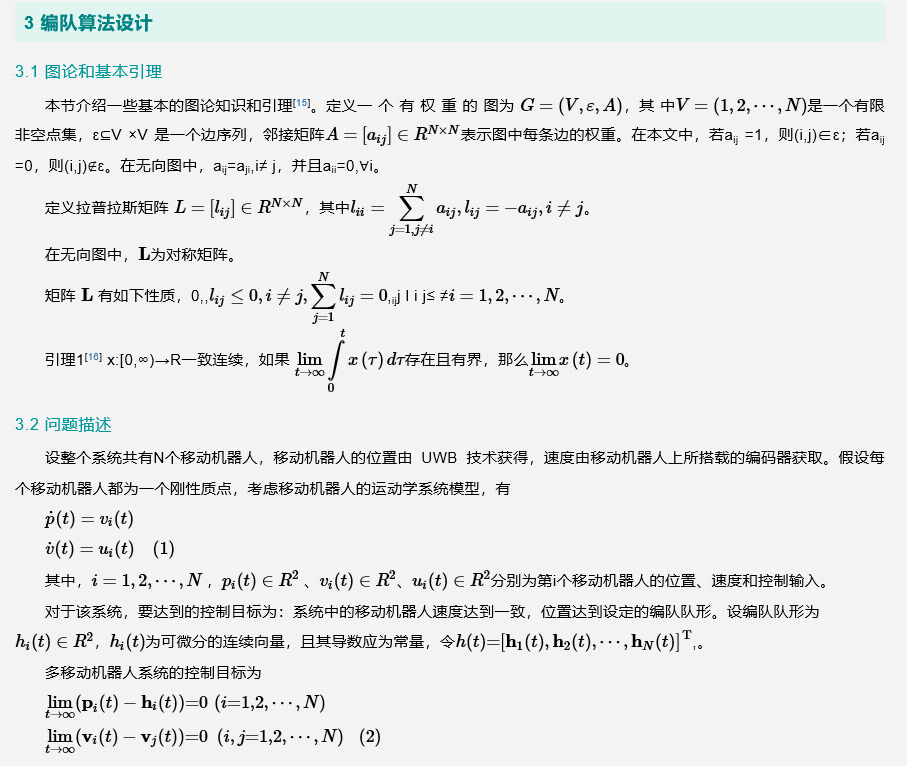
1 引言
多移动机器人的编队问题一直是分布式人工智能的研究热点,也是协同控制中一个重要的研究方向。多移动机器人编队是指多个地面移动机器人按照一定的队形进行自主运动。随着电子技术、导航系统技术、机电技术的发展[1,2],多移动机器人有着丰富多样的外形,常见的移动机器人有履式机器人、轮式机器人等[3],更可以搭载多种传感器及定位装置。多移动机器人的编队应用领域广泛,如无人驾驶技术[4]、灾难救援、车联网系统[5]、军事作战、搬运货物[1]等。常用的定位系统有GPS、摄像头定位等。GPS在室内无法使用,摄像头定位则适用范围较为局限,需要进行校准。超宽带(ultra-wideband,UWB)定位技术与之相比具有更多优势:不受室内外限制,使用简单,且定位精度高、范围广。
超宽带定位系统有测距和测向两项功能,具有传输速率高、系统容量大、成本低等特点[6]。一般采用基于距离的定位算法,常用的包括信号到达角度(angle of arrival,AOA)定位算法、接收信号强度(received signal strength,RSS)分析法、到达时间(time of arrival,TOA)定位算法、到达时间差(time difference of arrival,TDOA)定位算法等多种定位算法[7]。UWB定位技术由于具有良好的性能,可应用于雷达探测、医学成像和室内定位等多个领域[8]。基于 UWB 定位技术的多移动机器人编队问题已有部分国内外高校、企业机构做了相关研究。文献[9]中基于UWB定位技术并通过LabVIEW实现了自主跟随机器人的系统开发[10]。文献[11]中使用 UWB 技术做定位,实现了包括四旋翼和全向机器人的多异构机器人的轨迹跟踪控制。文献[12]中使用UWB技术让多移动机器人完成编队,但并未使速度达成一致。本文通过UWB技术获取移动机器人的位置,并采用分布式控制算法使机器人能够完成设定的编队队形,使其速度保持一致。
本文的组织结构安排如下:首先给出系统硬件设计,然后建立系统模型,并设计出分布式控制算法,证明算法稳定性,最后给出仿真实例来验证算法有效性。
2 系统设计
多移动机器人编队系统主要由多个移动机器人、UWB无线传感器网络和上位机显示软件构成[12,13,14],系统框架示意如图1所示。

图1 系统框架
UWB 无线传感器网络包括 4 个基站和标签,通过TDOA算法实现移动机器人的定位功能,移动机器人之间的通信通过Wi-Fi协议实现,交换彼此的位置和速度,以实现分布式控制。
如图2所示,移动机器人上装载Pixhawk控制板和树莓派。Pixhawk 控制板连接 UWB 标签和编码器,用于测量移动机器人的位置和速度信息,移动机器人之间可以用 Wi-Fi 收发彼此的位置和速度。树莓派搭载摄像头,将所拍摄图像通过 Wi-Fi收发模块传送给上位机显示软件,上位机显示软件可以显示移动机器人所拍摄的图像以及机器人所在的位置,以此达到监控的目的。

图2 机器人系统硬件设计
3.4 仿真实例
在本节中,给出仿真实例来验证算法的有效性。考虑4个移动机器人组成的编队系统,该系统的通信拓扑结构如图3所示。系统的邻接矩阵A和拉普拉斯矩阵L分别为
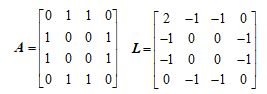
系统的初始值和参数设置见表1。

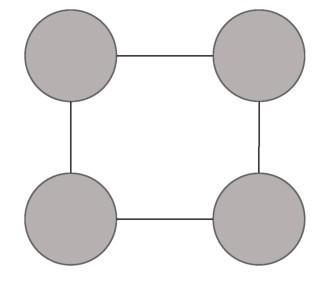
图3 编队通信拓扑结构
按照定理1的设计,设置系统初始值和参数(见表1),最后可得到仿真实验结果如图4和图5所示,可以看到4个移动机器人的速度逐渐达到一致,队形也设定成正方形编队运行。如图4所示,4个移动机器人的速度从不一致到最后逐渐达到一致,这符合证明结果。如图5所示,在运行过程中,移动机器人从初始位置逐渐形成了编队队形。图5中特意选取 4 个移动机器人在t=10 s和t=20 s时的编队状态,可以看出移动机器人已经完成了编队,这也与图4一致(图4中,在t=10 s时,移动机器人基本已经达到速度一致性)。

图4 多移动机器人速度/时间变化曲线

图5 多移动机器人编队队形
4 结束语
本文首先给出了多移动机器人的硬件框架,并设计了一种基于UWB定位技术的多移动机器人编队控制算法,在给出稳定性的证明之后,又通过仿真实验证明了算法的有效性。从仿真实验中可以看出,该算法能够使多机器人系统达成速度一致性,并且能够按照给定轨迹曲线实现编队队形。在未来的工作中,会针对轨迹曲线出现抖动的现象,做进一步的算法优化和研究。



https://wap.sciencenet.cn/blog-951291-1187727.html
上一篇:智车科技第26周自动驾驶周刊丨蔚来宣布召回4803辆ES8;苹果确认收购自动驾驶公司Drive.ai
下一篇:结合深度学习与生物特征识别在冷链拣选中的算法研究
全部作者的精选博文
全部作者的其他最新博文
全部精选博文导读
相关博文
- • Does Consciousness Depend on Hallucination?(初学者版)
- • Relativity of Consciousness (初学者版)
- • Artificial Consciousness in Legal Applications (初学者版)
- • 2024-6-22回顾:Integrating the DIKWP Model into Hardware(初学者版)
- • Child-Safe Device Using the DIKWP Model(初学者版)
- • Purpose Driven 3-No problem-solving of DIKWP-TRIZ(初学者版)