博文
陀螺力矩与“鱼鹰”飞机
 精选
精选
|
快速旋转且旋转轴在空间中可改变方向的物体称为陀螺。陀螺的运动有两种基本属性:定轴性和进动性。无力矩作用时陀螺的旋转轴保持空间中的方位不变,称为定轴性。有力矩作用时转动轴在空间中缓慢转动,其端点的运动方向与力矩矢量一致,称为进动性。在博文“抖空竹与欧拉方程”里已有过详细的解释。
将一个由转子和框架组成的陀螺抓在手里转动手腕,可从手心感觉到转子对运动的激烈反抗(图 1)。这种现象的出现来自陀螺的进动性。为使陀螺的转动轴在空间中改变方位,必须由外界施加力矩方能实现。陀螺对施力物体会产生反作用力矩,作用于施加力矩的物体。后者所感受到的力矩就称为陀螺力矩 (gyroscopic torque)。因此陀螺力矩也可视为陀螺进动性的一种表现形式。
图1 感受陀螺力矩
将载体选作动参考坐标系。将动量矩定理以动坐标系为参考系,当坐标系以角速度 ωR 转动时,惯性空间中的微分过程改为在动坐标系中进行,用相对导数表示为
![]()
其中 L 为物体的动量矩,M 为外力矩,带波浪号的导数符号表示相对导数,即相对动坐标系的求导过程。将上式中的第二项移至方程的右边,引入符号 Mg = - ωR×L,改写为
其中 Mg 就是动坐标系中的观测者所感觉到的陀螺力矩。它的方向垂直于陀螺的动量矩矢量 L 和载体转动的角速度矢量 ωR。将右手食指指向转子旋转轴,中指指向载体转动轴,则拇指的方向即为陀螺力矩的方向。物体在动坐标系中的相对运动由实际作用的力矩 M 和陀螺力矩 Mg 共同确定。
陀螺力矩是在转动的载体中观察到的力学现象。依据博文“科氏惯性力与振动陀螺”中的说明,当载体发生转动时,安装在载体中的转子的每个质点均有科氏惯性力产生。陀螺力矩实际上就是全部科氏惯性力对转子质心的合力矩。相关的数学证明在附录中给出。
高速旋转机械的设计制造必须考虑陀螺力矩的存在。以大型船舶为例,当船只改变航向时,螺旋桨驱动轴上产生的陀螺力矩可引起轴承上的附加动载荷。单螺旋桨飞机改变航向时,螺旋桨的陀螺力矩可迫使飞机抬头或点头。对于双螺旋桨飞机,令两个螺旋桨朝相反方向转动,可使陀螺力矩相互抵消。同样道理,鱼雷尾部并列的两个螺旋桨的转动方向也必须相反。即使是安装在固定基座上的旋转机械,当旋转轴的弹性变形使转子的极轴产生偏转,导致动量矩矢量 L 和旋转轴的角速度不共线时,也会产生陀螺力矩引起附加动载荷。
除上述负面效应以外,陀螺力矩也能为人类所利用。农村里最常见的石碾子就是陀螺力矩最古老的应用范例(图 2)。设石碾子半径为 R,与碾盘的接触线中点处无相对滑动,该点距转轴的距离为 l,当碾子绕垂直的转轴以 Ω 为角速度转动时,碾子的自转角速度为 ω = (l/R) Ω。设碾子的质量为 m,极惯性矩为 J = mR2/2。令ωR = Ω,所产生的陀螺力矩为 Mg = JωΩ = mRlΩ2/2,在中点处对碾盘作用附加压力 Fg= mRΩ2/2,从而提高了碾子的滚压效率。此附加压力与转速 Ω 的平方成正比。农村的手推石碾因转速缓慢影响不显著,但对高速旋转的工业研磨机器,陀螺力矩产生的动压力远大于静压力。
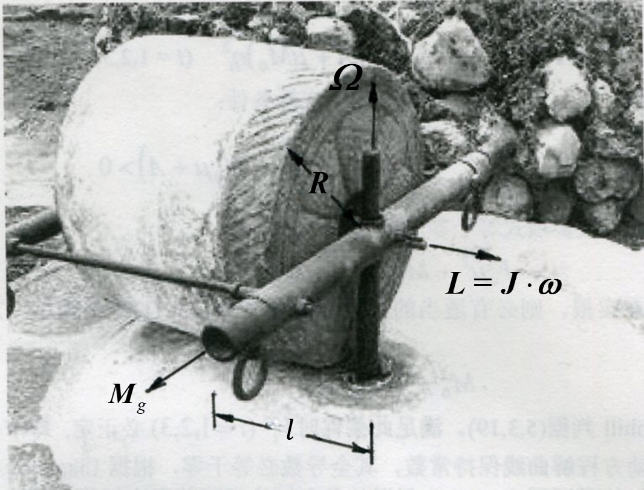
图2 石 碾子的陀螺力矩
博文 “科氏惯性力与振动陀螺” 中曾说明,科氏惯性力可用于量测载体的角速度。则科氏惯性力产生的陀螺力矩应也能用于载体角速度的量测。例如将一个由转子和框架组成的陀螺仪安装在载体上,设框架的转轴为 x轴,转子动量矩 L 沿 z 轴(图 3)。当载体绕 y 轴以角速度 ωR 转动时,产生绕 x 轴的陀螺力矩 Mg = ωRL 使框架绕 x 轴转动,设转角为 α。若在框架和载体之间增加弹簧,使框架的转动引起弹簧变形。当陀螺力矩 Mg 与弹簧力矩 Ms = kα 平衡时,框架在载体内相对静止,框架转角 α = (L/k)ωR 与载体的转动角速度成正比。这种可量测载体角速度的仪器称为速率陀螺仪 (rate gyroscope)。若将弹簧换成阻尼器,阻尼力矩 Md = c(dα/dt) 与框架转动的角速度成正比,c 为阻尼系数。则 dα/dt = (L/c)ωR,框架转角 α 必与载体角速度 ωR 的积分,即载体转过的角度成正比。这种可以量测载体转角的陀螺仪称为积分陀螺仪 (integrating gyroscope)。
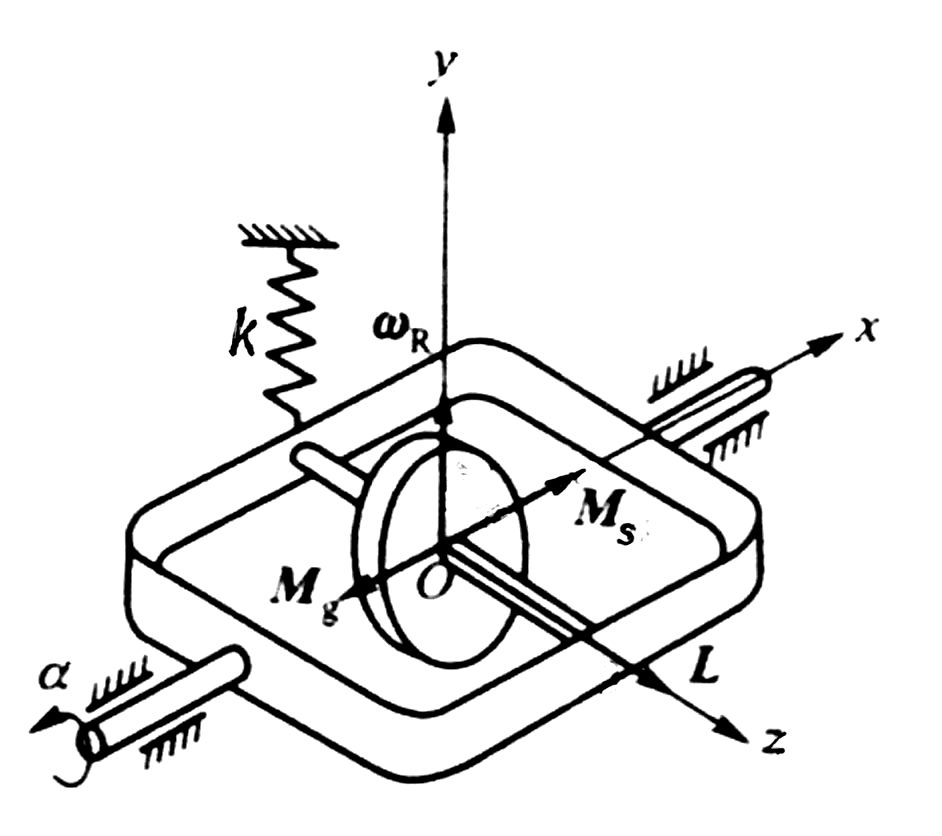
图3 速率陀螺仪
此外,在大型船舶中安装巨大的转子,利用陀螺力矩抑制在风浪中的摇摆。利用陀螺力矩实现能直立稳定的单轨火车。在人造卫星中安装受控制的飞轮,利用陀螺力矩控制卫星的姿态等。在博文 “单轨火车与陀螺稳定性” 中已有过详细的叙述。
上述各种情况表明,对于带旋转部件的载体,利用陀螺力矩概念分析其动力学特性,可对于载体的稳定性做出定性的结论。以美国设计制造的 “倾斜旋翼机” 为例。这个以 “鱼鹰”(Osprey)命名的运输机是在固定机翼的两端安装两个旋翼的特殊飞行器(图 3)。旋翼的旋转轴方向可以调整,与机身平行时与普通双引擎螺旋桨飞机相同。如转到与机身垂直,就成为带固定机翼的双旋翼直升机。因此同时具有固定翼飞机运载能力强、速度快和航程远,以及旋翼飞行器轻便灵活、能垂直升降的双重优点。但这种新型飞机研制过程并不顺利。据报导,在研制初期曾有过多起机毁人亡的事故。1988 年美国生产的 7 架原型机就有 4 架相继摔落,即使到了发展后期的 2000 年又发生两起严重的坠机事故。事故频发与特殊旋翼的陀螺力矩不无关系。

图3 V-22“鱼鹰”运输机
“鱼鹰” 飞机和普通飞机的区别就是机翼上多装了两个旋翼。这两个大型旋转物体加在飞机上,可使飞机的运动性态产生极大的变化。利用陀螺力矩知识判断,“鱼鹰” 装在机翼上的两个旋翼也必须朝相反方向转动,使可能发生的陀螺力矩合力矩等于零。但由于作用在机翼两端,陀螺力矩可引起机翼的扭转或弯曲变形,继而改变机翼的空气动力。与常规的固定翼或旋翼飞机相比,“鱼鹰” 具有更复杂的陀螺效应。
设“鱼鹰”的质心为 O,建立连体坐标系 (O-xyz),x, y, z 分别为飞机的滚动轴、俯仰轴和航向轴。设旋翼处于直立的工作状态,左侧旋翼绕与 z 轴平行的旋转轴顺时针旋转,产生向下的动量矩 L1,右侧旋翼逆时针旋转产生向上的动量矩L2。当机身以角速度ω绕x轴滚动时,两侧旋翼产生的陀螺力矩 M1 = L1×ω 和 M2 = L2×ω 分别沿 y 轴的负向和正向(图 4)。机翼在两侧方向相反的陀螺力矩作用下产生扭转变形,使左侧的机翼断面绕 y 轴顺时针偏转,加大了气流的攻角,升力随之增大。右侧的机翼断面的偏转方向相反,减小了气流的攻角,升力随之减小。空气动力增量构成绕 x 轴的力矩,促使机身作更强烈的滚动。
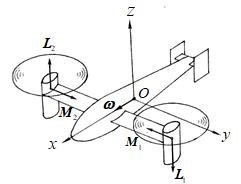
图4 滚动运动产生的陀螺力矩
当机身以角速度 ω 绕 y 轴作俯仰运动时,两侧旋翼的陀螺力矩 M1 和 M2 分别指向 x 轴的正向和负向(图5)。机翼在方向相反的陀螺力矩作用下产生弯曲变形,使两侧机翼的末端均向上加速运动。安装在机翼两侧的短仓产生向下的惯性力,对机翼后方的飞机质心 O 产生绕 y 轴的力矩,促使机身作更强烈的俯仰运动。旋翼在水平位置与垂直位置之间转换的过程中,短仓相对机身的角速度也会产生与俯仰运动相同的效果。
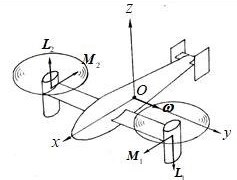
图5 俯仰运动产生的陀螺力矩
以上分析表明,对于 “鱼鹰” 类型的带旋转物体的飞行器,陀螺效应与空气动力的综合效应是不可忽略的重要因素。当飞机因扰动产生偏转时,旋翼的陀螺效应起了正反馈作用使偏转加剧,成为影响飞行安全的不稳定因素。
利用陀螺力矩的知识判断,似也存在这种可能性,即改变两侧旋翼的转动方向,使左侧旋翼逆时针旋转,右侧旋翼顺时针旋转。则改变方向后的陀螺力矩可使扰动引起的偏转角减小,使陀螺效应的正反馈变为负反馈,不稳定因素转化为稳定因素。至于这设想在实践中是否有效就只能依靠实践来检验了。
(改写自:刘延柱. 趣味刚体动力学(第2版), 5.3节及5.22节. 高等教育出版社,2018)
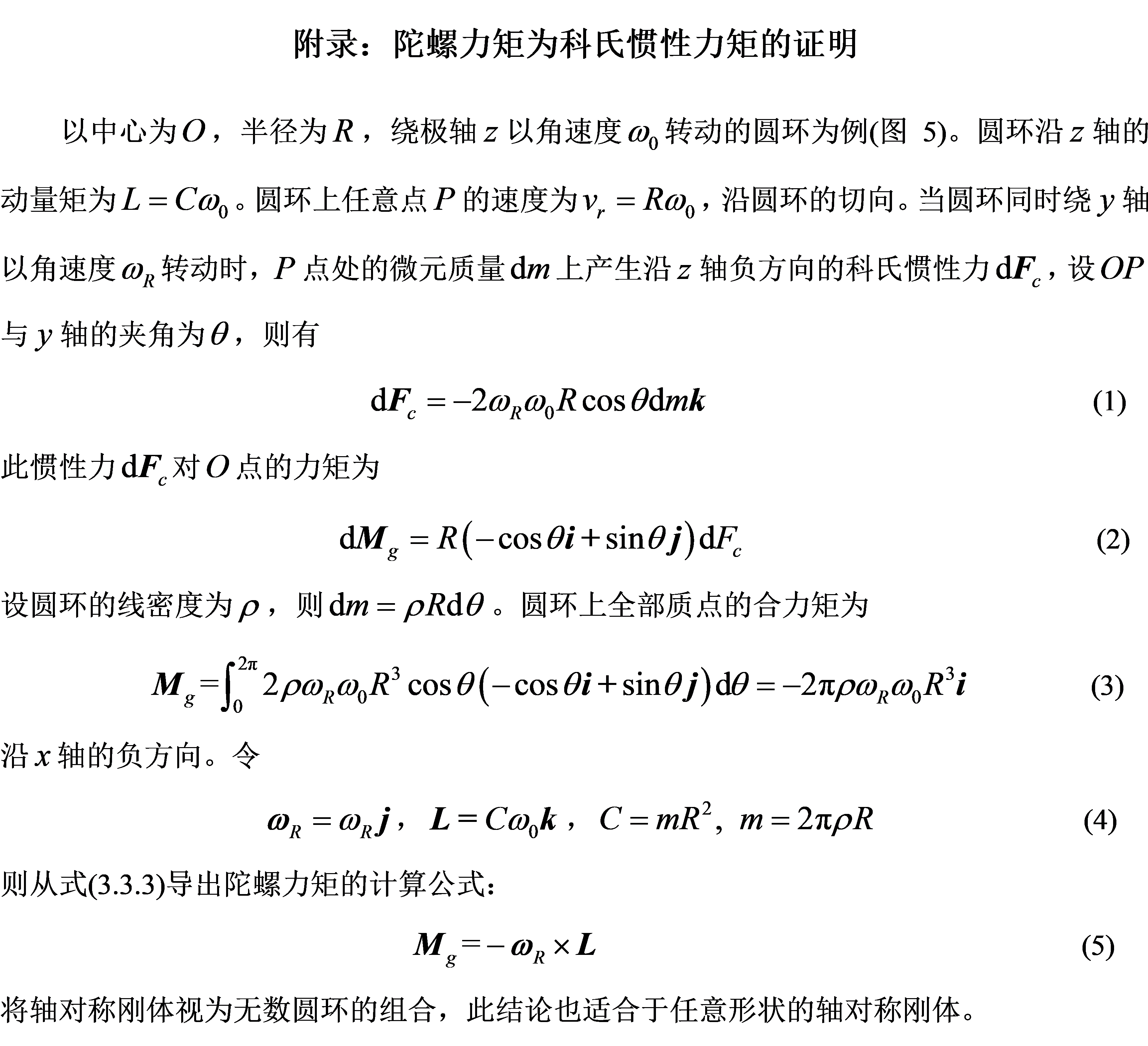
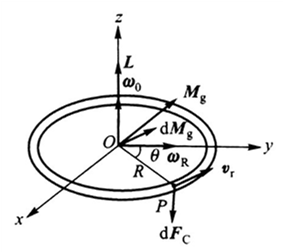
图5 圆环的陀螺力矩
https://wap.sciencenet.cn/blog-3452605-1266059.html
上一篇:科氏惯性力与振动陀螺
下一篇:陀螺罗经:力学与工程的完美结合