博文
带未知模型参数和衰减观测率系统自校正分布式融合估计
|
近年来,多传感器信息融合技术得到广泛关注。经典Kalman 滤波需要已知模型参数和噪声统计特性。而在实际应用中,系统可能会出现模型参数或噪声统计特性未知情况。同时,在实际的网络化系统或传感器网络中,由于传感器老化或故障、以及传感器的观测数据在通信传输过程中由于带宽有限可能会出现数据丢失、衰减或延迟,使得估值器所收到的传感器数据具有不完整现象。因此,同时考虑带有未知模型参数和未知衰减观测率多传感器系统的自校正融合估计问题尤为重要。
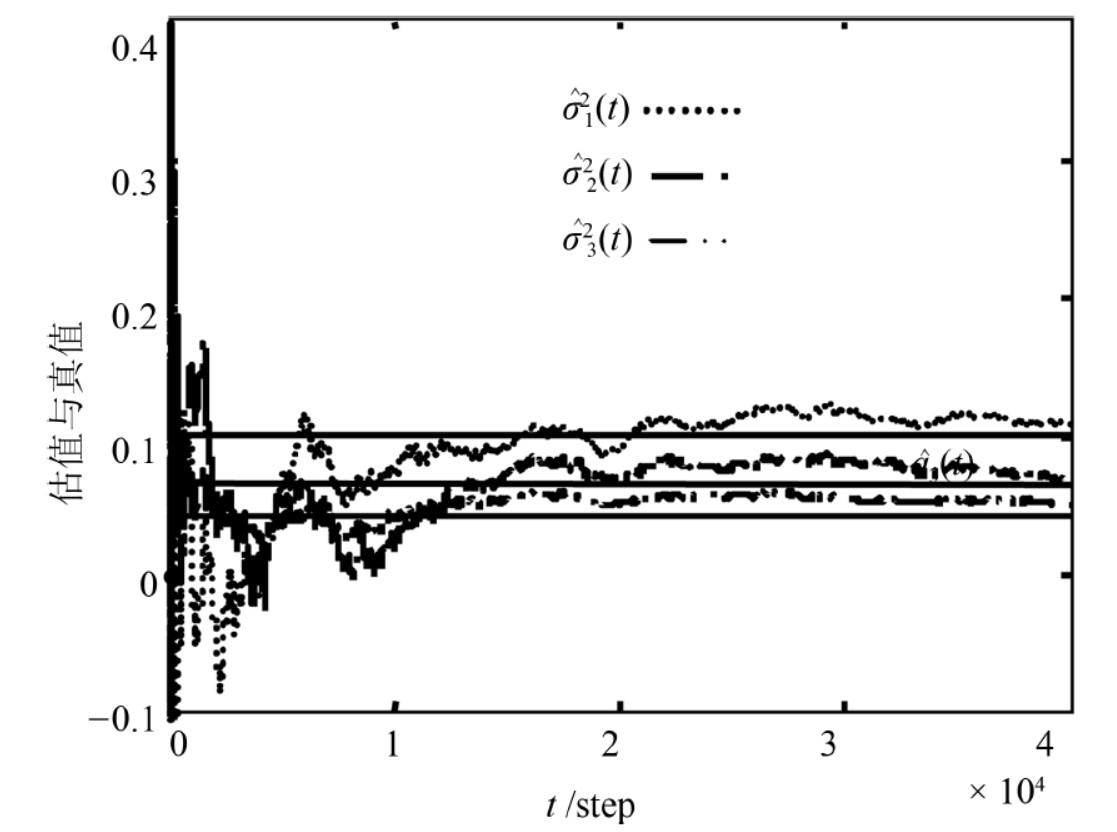
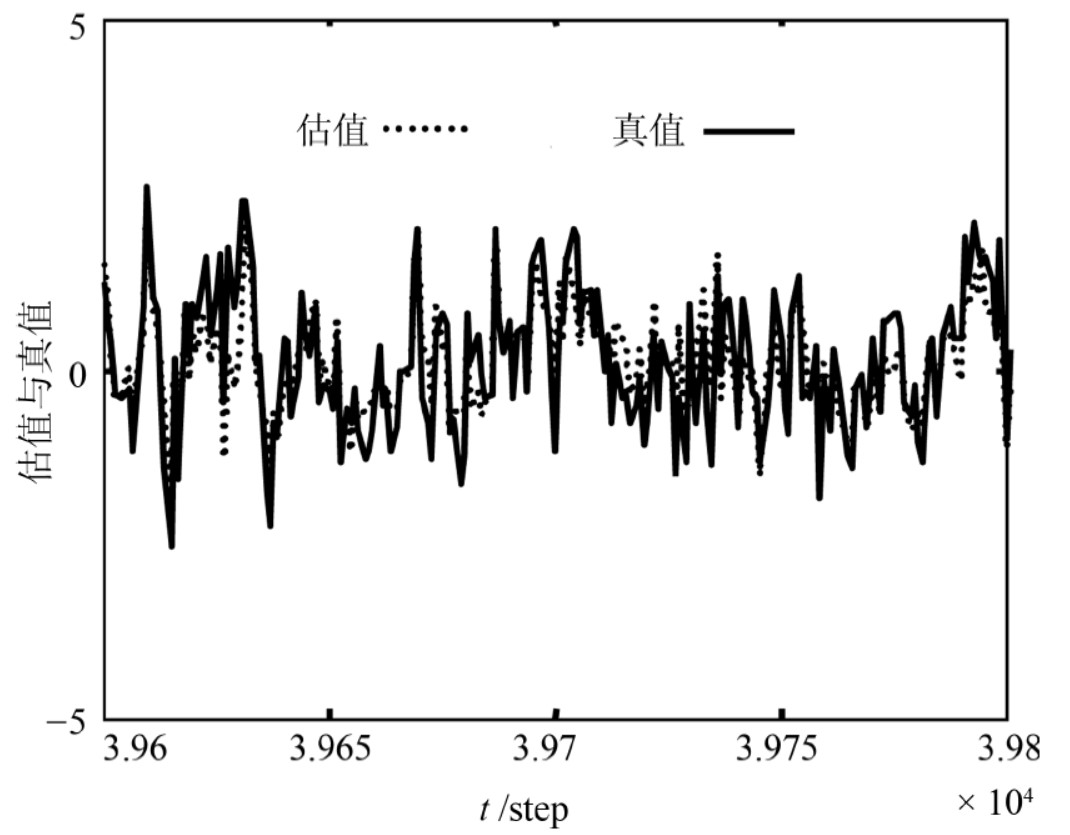
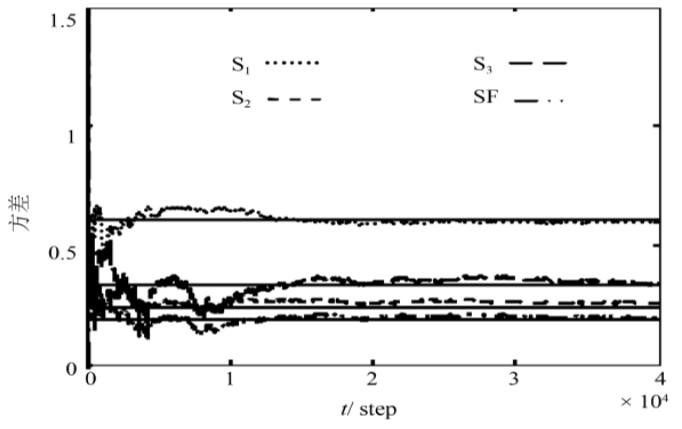
段广全, 孙书利. 带未知模型参数和衰减观测率系统自校正分布式融合估计. 自动化学报, 2021, 47(2): 423-431 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180270?viewType=HTML 针对带未知模型参数和衰减观测率的多传感器随机系统,应用递推增广最小二乘算法和相关函数分别对未知模型参数、描述衰减观测现象的随机变量的数学期望和方差进行在线实时辨识,提出了线性无偏最小方差矩阵加权融合模型参数辨识器。将实时辨识的模型参数、数学期望和方差代入到最优局部和融合状态估计算法中获得了相应的自校正状态滤波算法。利用动态误差系统分析方法证明了自校正状态滤波器收敛于最优状态滤波器。 图1 未知参数估计 图2 期望辨识 图3 方差辨识 图4 状态分量1的自校正融合滤波值 图5 状态分量1的局部、融合最优与自校正滤波误差方差 图1-3分别给出了未知模型参数融合辨识结果以及描述不同传感器中数据衰减的随机变量的数学期望和方差的辨识结果。由图可知随着时间的增长, 辨识结果收敛于真值。图4为自校正融合滤波器,图5为局部与融合最优与自校正滤波误差方差的比较图。由图可知自校正局部与融合估计具有渐近最优性。 作者简介 段广全 哈尔滨工业大学博士研究生, 2019年于黑龙江大学获硕士学位. 主要研究方向为状态融合估计和系统辨识. E-mail: dsnx369@163.com 孙书利 黑龙江大学电子工程学院教授. 主要研究方向为状态估计, 多传感器信息融合. 本文通信作者. E-mail: sunsl@hlju.edu.cn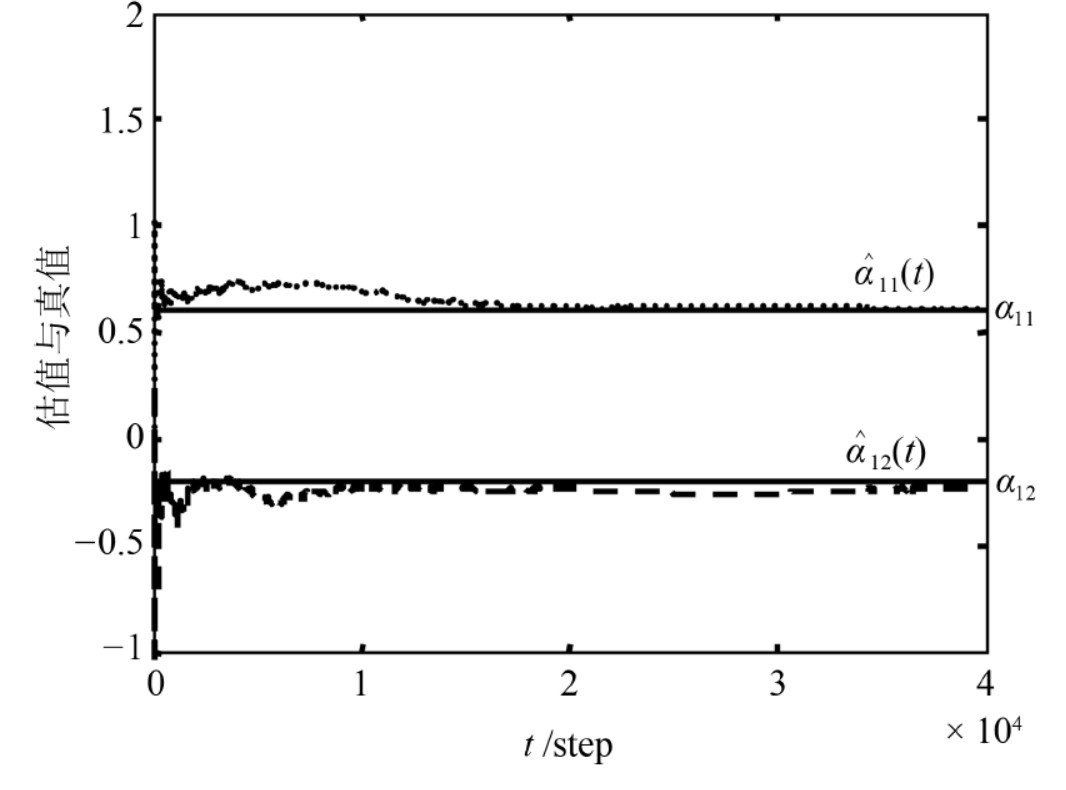

https://wap.sciencenet.cn/blog-3291369-1281153.html
上一篇:直播预告‖自动化前沿热点讲堂之第十二讲
下一篇:【当期目录】IEEE/CAA JAS 第8卷 第4期