博文
基于人机信息交互的助行外骨骼机器人技术进展
|
美国超级英雄电影《钢铁侠》中,托尼·斯达克身着钢铁外衣上天入海无所不能,这是人类长久以来的梦想。从上世纪60年代人类第一款动力外骨骼机器人的推出以来,由于其在军事、工业、医疗领域蕴含的巨大价值,全球各地的研究单位和学者们不断努力着。

外骨骼的动力驱动形式多种多样,有重视负重能力的液压驱动、快速灵活的电机驱动、刚柔并济的柔性驱动,更有人机协作的混合驱动。测量反馈中也有运动学和动力学检测,保证外骨骼在运行过程中的安全可靠。最重要的是,新型外骨骼的发展更加注重了神经信息层面的人机交互,利用类似人体控制肌体自身的方式,识别EEG或者sEMG中的运动意图成分控制外骨骼运动。
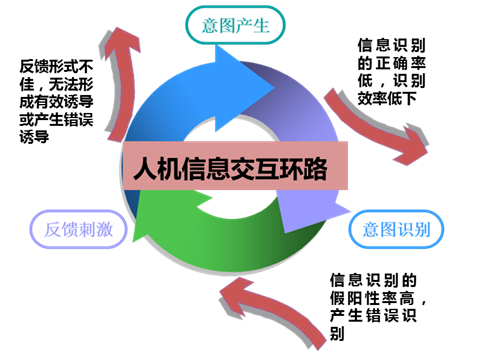
图1人机信息交环路及可能存在的制约瓶颈
随着人工智能技术和神经科学的发展,外骨骼机器人与人体的交互协作表现得更加融洽,正加速向人机共融迈进。如图1所示,外骨骼和人体的人机信息交互环路分为意图产生、意图识别、反馈刺激三个关键节点,依次说明了制约交互环路信息紧密性的三大瓶颈问题(意图产生环节信息识别准确性、意图识别环节信息反馈时效性、反馈刺激环节信息内容形式的有效性)和对中枢神经可塑性诱导的影响关系。由此得到启示:唯有深入研究中枢神经可塑性在神经康复过程中的神经信息融合机制、建立合适的人机协同交互信息环路模型,并分析环路关键点的权重比例、寻求良好的平衡机制,才能有效利用中枢神经可塑性机理从根本上提高中枢神经损伤患者的康复疗效。
针对基于人机信息交互的助行外骨骼机器人技术,本文综述了现有的国内外文献,介绍相关技术的异同,并汇总了公开的研究成果进行比较。
引用格式:明东, 蒋晟龙, 王忠鹏, 綦宏志, 万柏坤. 基于人机信息交互的助行外骨骼机器人技术进展. 自动化学报, 2017, 43(7): 1089-1100
链接:http://html.rhhz.net/ZDHXBZWB/html/2017-7-1089.htm
作者简介:
明东 天津大学精密仪器与光电子工程学院教授. 主要研究方向为神经工程,康复工程, 脑机接口和生物医学信息处理. 本文通信作者.
E-mail: richardming@tju.edu.cn
蒋晟龙 天津大学精密仪器与光电子工程学院博士研究生. 主要研究方向为康复机器人, 神经肌肉电刺激.
E-mail: justinjiang@tju.edu.cn
王忠鹏 天津大学精密仪器与光电子工程学院硕士研究生. 主要研究方向为神经肌肉电刺激.
E-mail: wzp2468@126.com
綦宏志 天津大学精密仪器与光电子工程学院副教授. 主要研究方向为生物医学信号处理, 神经工程, 脑-机接口.
E-mail: qhz@tju.edu.cn
万柏坤 天津大学精密仪器与光电子工程学院教授. 主要研究方向为生物医学信息检测与医学仪器, 模式识别与特征提取算法, 神经工程与康复医学, 脑机交互及人工智能设备.
E-mail: bkwan@tju.edu.cn
https://wap.sciencenet.cn/blog-3291369-1079948.html
上一篇:磁偶极子跟踪的渐进贝叶斯滤波方法
下一篇:一类面向中风后吞咽功能障碍康复治疗的群体智慧涌现方法